Raumfahrt












Jobsuche für Ingenieure

Fremde Planeten



Technik im und für den Weltraum


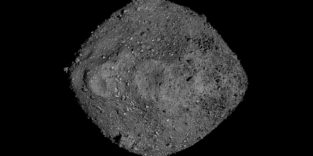
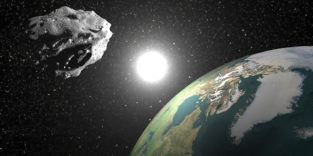
Asteroiden und Kometen

Informieren Sie sich über Entwicklungen und Trends in der Raumfahrtbranche. Welche Projekte verfolgen die großen Raumfahrtorganisationen Nasa und Esa, welche Staaten rücken an die führenden Raumfahrtnationen USA und Russland heran und welche Ziele verfolgen die privaten Anbieter wie SpaceX? Wir nehmen Sie in dieser Kategorie mit ins All.