Kosmonaut steuert auf ISS per Joystick einen Roboter auf der Erde
Objekte im All oder auf Himmelskörpern sollen künftig per Fernbedienung repariert werden. Die Roboter sollen dabei per Joystick gesteuert werden. Jetzt ist auf der ISS ein solcher Prototyp eines Joysticks eingetroffen, mit dem der russische Kosmonaut Oleg Kononenko einen Roboter im DLR-Zentrum in Oberpfaffenhofen steuern sollen.

Der Joystick Kontur-2 soll in Zukunft von den Ingenieuren an Bord der Internationalen Raumstation ISS bedient werden. Mit ihm können Roboter im All ferngesteuert werden. Im August gibt es einen Testlauf mit dem Kosmonauten Oleg Kononenko, der den Roboterarm Rokviss im DLR-Zentrum in Oberpfaffenhofen aus dem All steuern wird.
Foto: DLR
Oleg Kononenko, am 22. Juli auf der ISS angekommen, wird 400 km über der Erde kreisen und den Roboterarm Rokviss, der im DLR-Institut für Robotik und Mechatronik in Oberpfaffenhofen bei München auf seine Befehle wartet, nur über eine Kameraübertragung sehen. Im August wird Kononenko über den vom Deutschen Zentrum für Luft und Raumfahrt entwickelten Joystick Kontur-2 den Arm des Roboter steuern. Wenn das Experiment klappt.
Dabei braucht Kononenko besonders viel Fingerspitzengefühl. Denn noch ist gar nicht klar, wie sehr die Schwerelosigkeit im All die Feinmotorik eines Menschen im All bei der Steuerung besonders sensibler Vorgänge beeinflusst.
Die Kräfte, die auf den Roboterarm und seinen Greifer einwirken, werden von Sensoren erfasst und an Kontur-2 übermittelt. In den Joystick sind Aktoren integriert, die die ermittelten Kräfte auf die Finger des russischen Raumfahrers übertragen. Erreicht Rokviss beispielsweise eine Schraube, die es zu lösen gilt, spürt Kononenko den Widerstand, wenn der Greifer sie berührt und kann darauf reagieren. Der so genannte Telepräsenzversuch soll bei seinem Bediener den Eindruck vermitteln, er sei vor Ort im Labor und nicht in einer Umlaufbahn um die Erde.
Außenreparaturen ohne Weltraumspaziergang
Die Fernbedienung mit Rückmeldung soll künftig genutzt werden, um Roboter im Orbit oder auf Oberflächen von Himmelskörpern etwa auf Mond oder Mars für Montage- und Reparaturaufgaben zu steuern, ohne dass der Bediener die Raumstation verlassen muss.
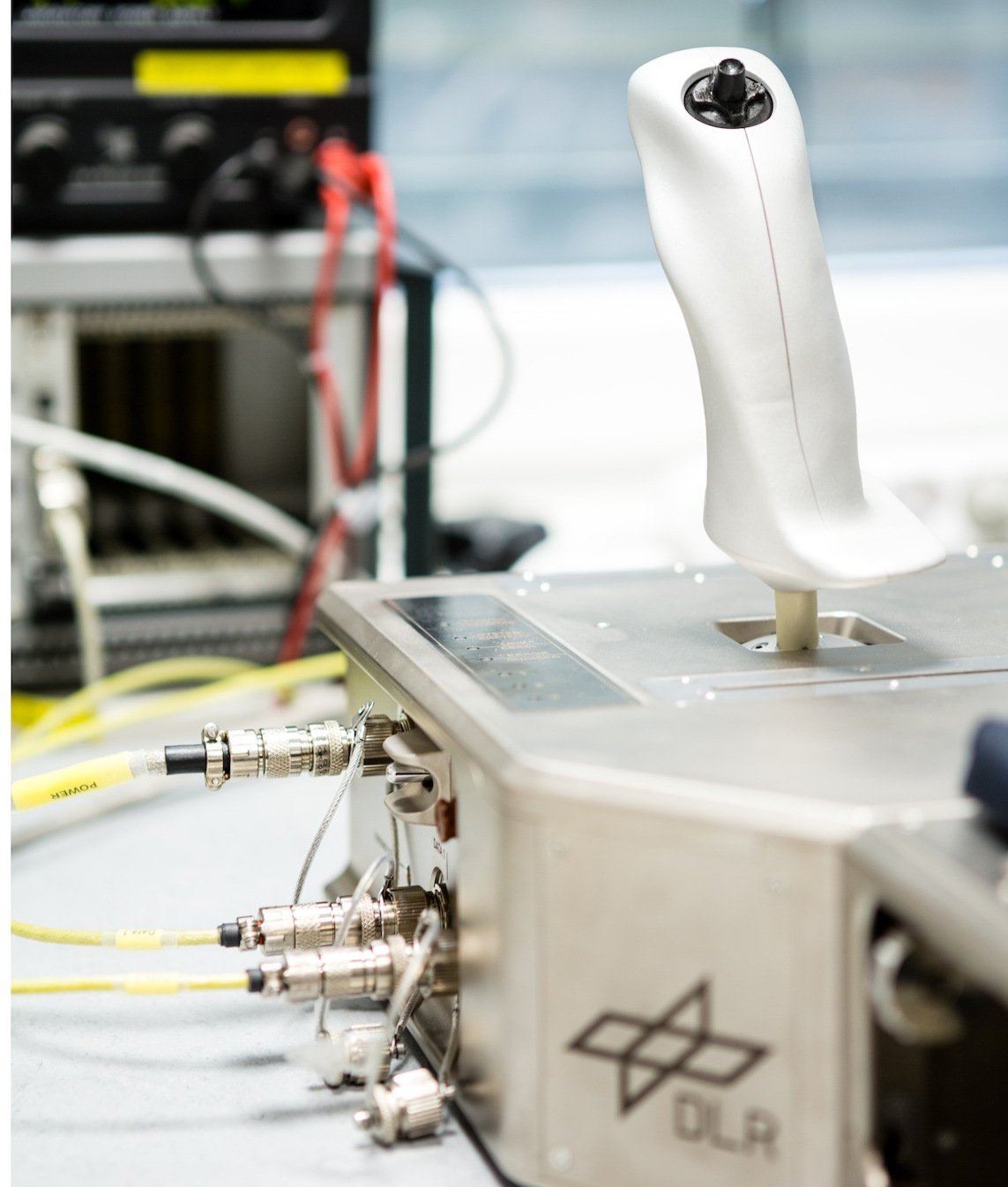
Mit dem Joystick Kontur-2 kann manden Roboterarm Roviss steuern, Dabei überträgt der Joystick auch Kontaktkräfte, die der Astronaut im Weltall ausübt und an den Roboterarm übertragen werden.
Quelle: DLR
Bis dahin ist der Weg allerdings noch weit. Denn das Fingerspitzengefühl ändert sich in der Schwerelosigkeit. „Wir wissen, dass die Sensomotorik der Astronauten in der Schwerelosigkeit leidet und wollen nun herausfinden, wie groß diese Einbußen sind“, sagt Bernhard Weber vom DLR-Institut für Robotik und Mechatronik.
Die Fernbedienung aus dem All ist höchst anspruchsvoll. Schließlich flitzt die ISS mit einer Geschwindigkeit von 28.000 km/h und in einer Entfernung von rund 400 km über die Empfangsantenne auf der Erde hinweg. Die Zeitverzögerung bei der Datenübertragung beträgt bis zu 100 Millisekunden. Trotzdem soll Kononenko praktisch in Echtzeit arbeiten.
Roboterarm Rokviss mit Weltraumerfahrung
Rokviss hat bereits Weltraumerfahrung. Von 2005 bis 2010 war der Roboterarm an der ISS angebracht. Er wurde mit einem Joystick aus Oberpfaffenhofen gesteuert. Seit seiner Rückkehr auf die Erde wird er zum Kosmonautentraining im Russian State Scientific Center for Robotics and Technical Cybernetics in St. Petersburg genutzt. Ein baugleiches Modell landete in Oberpfaffenhofen.
Anders als ein Joystick auf der Erde ist Kontur-2 im ISS-Labor fixiert. Außerdem ist er mit einem Haltegriff versehen. „Sonst würden die Kosmonauten beim Bedienen des Joysticks in der Schwerelosigkeit vielleicht unabsichtlich wegdriften“, sagt Weber. Dann geriete Rokviss auf der Erde außer Rand und Band.
Ein Beitrag von: