Mikro-Roboter imitiert Verhalten von Ameisen
Bislang brauchen Roboter einen gewissen Aktionsradius. Gibt es wenig Platz, bieten sich Systeme in Ameisengröße an. Wie ihre biologischen Vorbilder könnten sie Aufgaben gemeinsam erledigen.

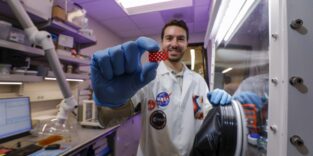
Mikroroboter neben einem US-Penny.
Foto: Allison Carter, Georgia Tech
Ameisen erreichen aufgrund ihrer Körpergröße, manche sind nur zwei Millimeter lang, schwer zugängliche Räumlichkeiten. Geht es darum, Futter in das Nest zu transportieren, arbeiten mehrere dieser Insekten zusammen. Diese Eigenschaften haben Bionik-Forscher am Georgia Institute of Technology auf technische Anwendungen übertragen.
Per 3D-Druck produzierten sie Mikro-Roboter. Ihre Tools sind 1,8 Millimeter breit, 0,8 Millimeter dick und wiegen ungefähr 5 Milligramm. Schwärme dieser Roboter könnten zusammenarbeiten, um Messungen durchzuführen, Gegenstände zu bewegen – oder vielleicht eines Tages Krankheiten im menschlichen Körper zu behandeln.
Energie aus Schwingungen nutzen
Miniaturisierung ist auch in der Robotik kein neuer Trend. Als Herausforderung erwies sich die Frage, wie man Energie auf die Geräte überträgt. Schon zuvor hatten Arbeitsgruppen mit Magnetfeldern experimentiert. Es gelang ihnen zwar, größere Mengen dieser Bots synchron anzutreiben, aber keine einzelnen Vertreter innerhalb des Schwarms anzusprechen.
Deshalb setzte Projektleiter Azadeh Ansar auf Vibrationen als Antriebsprinzip. Der Wissenschaftler arbeitet an der School of Electrical and Computer Engineering des Georgia Institute of Technology. Seine Bots arbeiten mit einem piezoelektrischen Aktor. Diese Einheit wandelt elektrische Signale in Bewegungen um. Piezoelektrische Materialien verformen sich beim Anlegen von Spannung. Hier kamen Piezoaktoren aus Blei-Zirkonat-Titanat (PZT) zum Einsatz.
Im Experiment nutzte Ansar externe Stromquellen, um Vibrationen auszulösen, weil keine Batterie klein genug ist, um auf den Bot zu passen. „Schwingungen könnten aber auch von Schall- oder Ultraschallquellen, etwa Mini-Lautsprechern, kommen“, schreibt Ansar. Dies sei noch nicht untersucht worden.
Bewegliche Borsten zur Richtungssteuerung
Vibrationen bewegen die federnden Beine auf und ab und treiben den Micro-Roboter vorwärts. Jeder von ihnen kann so konstruiert werden, dass er abhängig von seiner Beingröße, vom Durchmesser, Design und von der Gesamtgeometrie her auf unterschiedliche Vibrationsfrequenzen reagiert. Die Amplitude der Vibrationen steuert die Geschwindigkeit.
„Wenn sich die Beine eines Bots auf und ab bewegen, wird die vertikale Bewegung in eine gerichtete Bewegung umgewandelt“, erklärt Ansar. Mit gewinkelten Strukturen sei es gelungen, Vibrationen zur Fortbewegung zu nutzen. Die Prototyp-Roboter reagieren je nach Konfiguration auf unterschiedliche Vibrationsfrequenzen, sodass die Forscher einzelne von ihnen durch Anpassen der Vibration steuern können. Pro Sekunde legen sie das Vierfache ihrer eigenen Länge von 1,8 Millimetern zurück.
Herstellung per 3D-Druck
Noch ein Blick auf die Herstellung. Mikro-Borsten-Roboter werden in einem 3D-Drucker unter Verwendung von monomeren Ausgangsstoffen hergestellt. Sobald der Teil des Harzblocks, der mit ultraviolettem Licht bestrahlt wurde, chemisch reagiert hat, wird der Rest abgewaschen – und die Roboterstruktur bleibt übrig. 3D-Drucker könnten theoretisch kleinere Roboter produzieren, aber mit einer verringerten Masse steigen auch die anziehenden Kräfte zwischen den winzigen Bauteilen und einer Oberfläche. Mitunter konnten die Micro-Bots nicht von der Pinzette gelöst werden.
Ansar will im nächste Schritt untersuchen, welche Möglichkeiten des Upscaling es gibt. Das aktuelle Verfahren eigne sich im Labor, aber nicht, um größere Mengen der Bots zu produzieren, schreibt er. Sein Ziel ist, zu untersuchen, wie sich Schwärme der kleinen Roboter verhalten.
Zahlreiche Anwendungen denkbar
„Wir arbeiten außerdem daran, die Technologie robust zu machen; sie soll ja nicht nur im Labor zum Einsatz kommen“, berichtet Ansari. Er kann sich zahlreiche Möglichkeiten seiner Mikro-Bots vorstellen – zum Beispiel an der Schnittstelle von Mechanik, Elektronik, Biologie und Physik.
Dazu zählt nicht nur die Möglichkeit, Gegenstände an schwer erreichbaren Orten zu bewegen. Ärzte suchen schon länger nach Möglichkeiten, mechanische Gegenstände quasi nicht invasiv durch den Körper zu bewegen. Mehrere Bots könnten verschlossene Blutgefäße öffnen oder – nach chemischer Modifikation – an der Oberfläche eines Tumors andocken und diesen zerstören. Die Bots eignen sich generell, um biologische oder chemische Wirkstoffe im Organismus zu transportieren.
Mehr zu Bionik
- Roboter lernen das Klettern von Egeln
- Mach es wie die Pflanzen: Neue Solarzellen ahmen Photosynthese nach – mit Erfolg
- Schmetterlingsflügel verbessert Solarzellen
Ein Beitrag von: