Bosch entwickelt Sensor zur Positionsbestimmung
Selbstfahrende Fahrzeuge müssen jederzeit exakt lokalisiert werden können, damit sie sich im Verkehr sicher bewegen. Bosch hat dafür jetzt einen eigenen Bewegungs- und Positionssensor entwickelt.
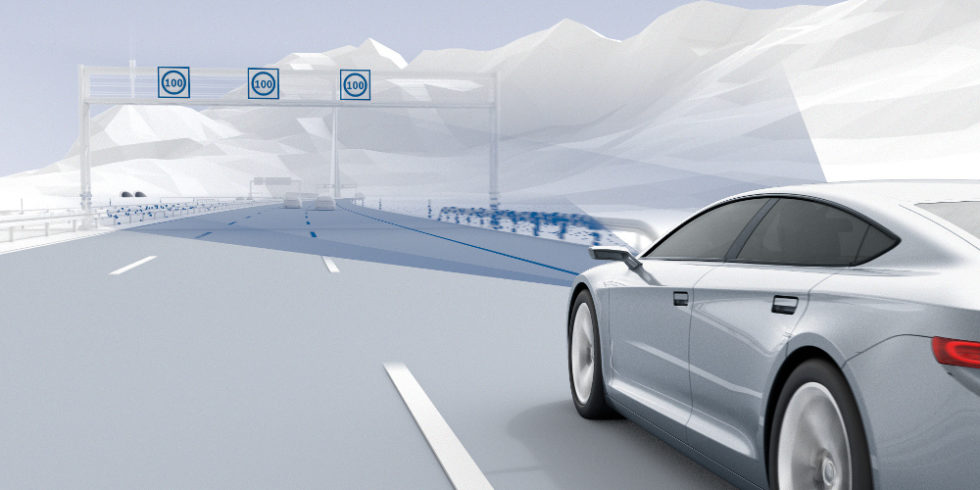
Das Auto erkennt die Straße und sein Umfeld, während korrigierte Satellitendaten seine Position genau bestimmen und Sensoren die Bewegungen des Fahrzeugs erfassen.
Foto: Bosch
Verzögerte Reaktionen, Unaufmerksamkeit, Fehleinschätzungen – all das gibt es bei einem gut programmierten Computer nicht. Theoretisch gelten selbstfahrende Autos daher als besonders sicher. Zumindest im Vergleich zu einem Menschen am Lenkrad, der auch mal vor sich hin träumt. In der Praxis müssen jedoch noch einige Herausforderungen bewältigt werden, ehe automatisiertes Fahren den Verkehr revolutionieren kann. Als eine der größten Schwierigkeiten gilt die genaue Lokalisierung der jeweiligen Fahrzeuge. Mit einem eigenen Bewegungs- und Positionssensor möchte Bosch dieses Problem lösen.
Kombination aus satellitengestützter Navigation und Sensordaten
Das System, das Bosch für die Lokalisierung selbstfahrender Autos entwickelt hat, ist aus mehreren Komponenten zusammengesetzt: Hardware, Software und Services sollen sich ergänzen. Herzstück ist der Bewegungs- und Positionssensor, der Signale des Globalen Navigationssatellitensystems (GNSS) empfängt und so die Position eines automatisierten Fahrzeugs grundsätzlich ermittelt. Allerdings fliegen die GNSS-Satelliten in einer Entfernung von 25.000 Kilometern um die Erde und erreichen dabei eine Geschwindigkeit von unvorstellbaren 4.000 Metern pro Sekunde, also 14.400 Stundenkilometern. Zusätzlich werden die Signale durch die verschiedenen Schichten in der Erdatmosphäre verfälscht. Mit anderen Worten: Die Daten sind ungenau. Sie reichen zwar für ein handelsübliches Navigationssystem aus, fürs automatisierte Fahren werden aber exaktere Werte benötigt.
Bosch hat daher im vergangenen Jahr gemeinsam mit Geo++, Mitsubishi Electric und U-blox das Joint Venture Sapcorda gegründet. Ziel des Gemeinschaftsunternehmens ist es, die Abweichungen der GNSS-Positionsinformationen zu korrigieren. Das soll über ein Netzwerk aus exakt vermessenen Referenzstationen auf der Erde geschehen. Die daraus entstehenden Korrekturdaten gelangen über eine Cloud oder geostationäre Satelliten ins Auto.
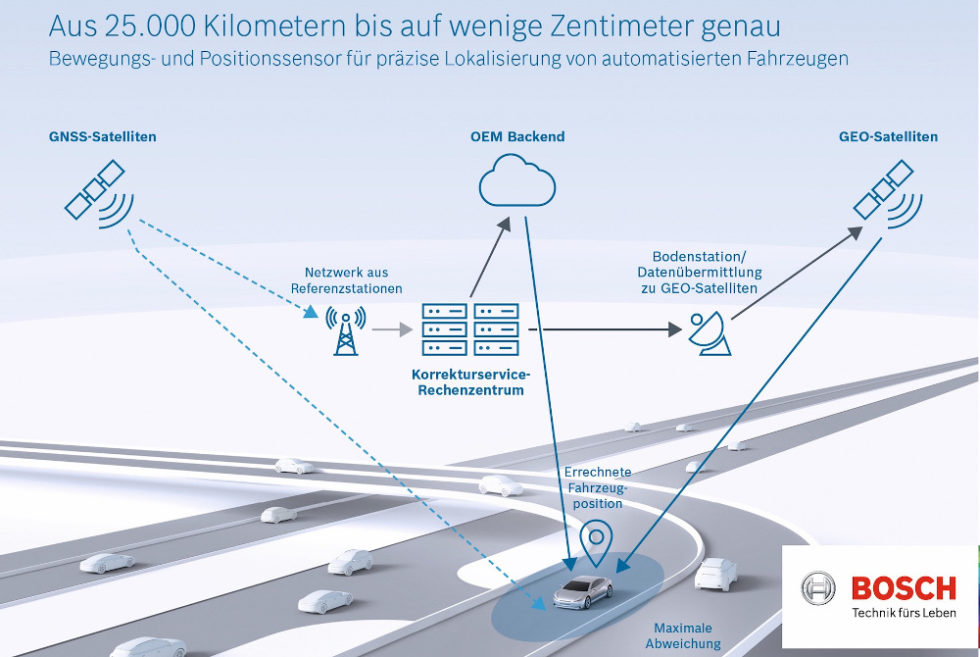
Ein komplexes System aus mehreren Komponenten soll dafür sorgen, dass ein selbstfahrendes Auto auf Spur bleibt.
Quelle: Bosch
Dort werden die Daten um weitere Informationen ergänzt: Spezielle Sensoren erfassen die Umdrehungen der Räder und den Winkel des Lenkrades. So ist es möglich, Richtung und Geschwindigkeit des autonomen Autos zu ermitteln. Bosch vergleicht das System mit dem menschlichen Tastsinn, der uns bei der Fortbewegung hilft. Der Bewegungs- und Positionssensor für autonome Fahrzeuge ist zusätzlich mit einer Inertialsensorik ausgestattet. Diese Technik ähnelt am ehesten dem menschlichen Gleichgewichtsorgan. Die Kombination aus diesen Informationen hilft dem System dabei, genau zu bestimmen, wo sich das automatisierte Fahrzeug hinbewegt. Das ist natürlich nur möglich, weil eine intelligente Software die eingehenden Daten verarbeitet.



Back-up-System bei Verbindungsabbruch: Karte mit Umfeldsensorik
Das klingt ausgereift. Doch was passiert, wenn die Satellitenverbindung ausfällt, weil das selbstfahrende Auto beispielsweise in einem Tunnel ist? Zumindest für einige Sekunden kann der Bewegungs- und Positionssensor die Lokalisierung des automatisierten Fahrzeugs aufrechterhalten. Ausgehend von der letzten bekannten Position wird diese anhand der Bewegungsdaten weiterhin berechnet. Bei einer längeren Unterbrechung kann die Straßensignatur von Bosch helfen.
Dieser Service greift auf bestehende Karten zurück und kombiniert sie mit einer Umfeldsensorik für autonome Autos. Die Fahrzeuge haben dafür unter anderem Video- und Radarsensoren an Bord, die stationäre Merkmale erfassen können, zum Beispiel Spurmarkierungen, Verkehrsschilder und Leitplanken. Ein Vorteil der Radarsensoren besteht darin, dass sie unabhängig von der Sicht arbeiten. Über ein Kommunikationsmodul im Auto werden die Informationen in eine Cloud hochgeladen, wo ein Programm eine eigenständige Kartenebene generiert, die wiederum Bestandteil einer hoch genauen Karte ist. Die automatisierten Fahrzeuge gleichen also während der Fahrt ab, ob die von ihnen erkannten Verkehrsschilder und Leitplanken mit den in der hoch genauen Karte hinterlegten Merkmalen übereinstimmen.
Automatisiertes Fahren als Zukunftstechnologie
„Services sind mindestens genauso wichtig für das automatisierte Fahren wie Hardware und Software“, sagt Bosch-Geschäftsführer Dirk Hoheisel. „Wir müssen alle drei Wege zeitgleich verfolgen, damit selbstfahrende Autos sicher und zuverlässig auf die Straßen kommen.“ Ganzheitliche Lösungen für das automatisierte Fahren sind ein wichtiges Ziel bei Bosch. Sie sollen der neuen Technologie langfristig zum Durchbruch verhelfen.
Stufe 0 – Driver only:
- Der Fahrer führt dauerhaft Längs- und Querführung aus.
- Kein eingreifendes Fahrsystem aktiv
Stufe 1 – Assistiert
- Der Fahrer führt dauerhaft Längs- oder Querführung aus.
- Das System übernimmt die jeweils andere Funktion.
Stufe 2 – Teilautomatisiert
- Der Fahrer muss das System dauerhaft überwachen
- Das System übernimmt Längs- und Querführung in einem spezifischen Anwendungsfall, etwa einem spezifischen Straßentyp, einem Geschwindigkeitsbereich oder einer speziellen Umfeldbedingung.
Stufe 3 – Hochautomatisiert
- Der Fahrer muss das System nicht mehr dauerhaft überwachen. Er muss aber potenziell in der Lage sein, zu übernehmen.
- Das System übernimmt Längs- und Querführung in einem spezifischen Anwendungsfall, erkennt Systemgrenzen und fordert den Fahrer zur Übernahme mit ausreichender Zeitreserve auf.
Stufe 4 – Vollautomatisiert
- Kein Fahrer erforderlich im spezifischen Anwendungsfall.
- Das System kann im spezifischen Anwendungsfall alle Situationen automatisch bewältigen.
Stufe 5 – Fahrerlos
- Von „Start“ bis „Ziel“ ist kein Fahrer erforderlich
- Das System übernimmt die Fahraufgabe vollumfänglich bei allen Straßentypen, Geschwindigkeitsbereichen und Umweltbedingungen.
Quelle: VDA
Weitere Themen:
- Immer wieder Unfälle mit autonomen Autos
- Apple lässt Autos mit eigener Technik autonom fahren
Ein Beitrag von:













