Roboterarme so biegsam wie Elefantenrüssel
Saarländische Forscher haben Roboterarme entwickelt, die extrem beweglich sind und sich ohne zusätzliche Sensoren steuern lassen. Untern anderem wären Anwendungen in der Medizin denkbar.
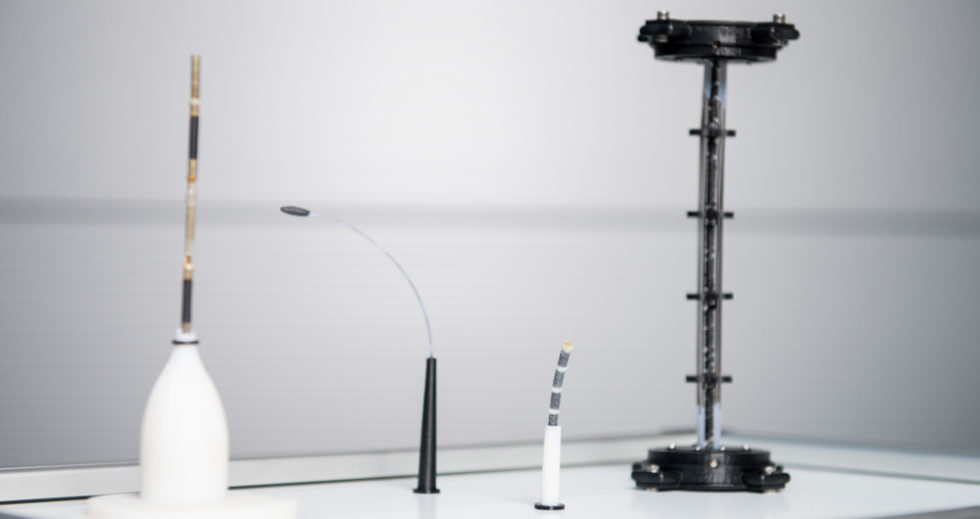
Die unterschiedlichen Roboterarme zeigen, wie gut sich die Technik skalieren lässt.
Foto: Oliver Dietze
Industrieroboter werden in sehr unterschiedlichen Bereichen benötigt, und die Bandbreite möglicher Einsatzgebiete steigt permanent. Vor allem die Digitalisierung und Fortschritte in der Entwicklung künstlicher Intelligenz erweitern ihr Potenzial. Umso wichtiger ist es, gleichfalls innovative Lösungen für die Mechanik zu finden. Denn der Beweglichkeit der meisten Robotergreifer sind Grenzen gesetzt, weil die einzelnen Bauteile größtenteils durch einzelne Gelenke miteinander verbunden sind. Bewegungen sind daher nur am Ansatz der Gelenke und nur in einem festgelegten Radius möglich. Wissenschaftlern der Universität des Saarlandes reichte das nicht aus. Sie haben eine Alternative entwickelt: Roboterarme, die sich in alle Richtungen biegen lassen. Als Basis dienten Formgedächtnisdrähte.
Natürliche Muskelstränge als Vorbild für Greifarme von Robotern
Das Prinzip der neuen Roboterarme haben die Forscher, wie so oft, von der Natur abgeschaut. In diesem Fall warfen sie zum Beispiel einen näheren Blick auf Elefanten und Kraken. Deren Rüssel beziehungsweise Arme sind äußerst biegsam. Die Tiere können sie in alle Richtungen schlenkern oder verbiegen und damit sogar kräftig zupacken. Für sie sind diese Körperteile wichtige Werkzeuge. Möglich wird das durch Zehntausende von Muskeln. Also haben die Wissenschaftler ebenfalls auf starre Bauteile und Gelenke verzichtet und stattdessen im Grunde genommen künstliche Muskeln aufgebaut.
Diese Muskelstränge bestehen aus haarfeinen Drähten aus Nickel-Titan, die sich anspannen und wieder entspannen können. Sobald Strom fließt, kontrahieren sie, vergleichbar mit echten Muskeln. Wird der Stromfluss beendet, setzt die Kontraktion aus. „Die Legierung Nickel-Titan besitzt ein sogenanntes Formgedächtnis. Wird ein Draht aus diesem Material verbogen, kann er seine ursprüngliche Form wieder annehmen. Fließt Strom durch einen solchen Draht, erwärmt er sich und seine Kristallstruktur wandelt sich so um, dass er sich verkürzt. Wird der Strom abgeschaltet, kühlt er ab und wird wieder lang“, erklärt Stefan Seelecke, Professor am Lehrstuhl für intelligente Materialsysteme. In der Entspannungsphase wird also automatisch die ursprüngliche Form beziehungsweise Position des Drahtes wiederhergestellt.
Hohe Zugkraft der Draht-Stränge trotz des geringen Durchmessers
Diese feinen Formgedächtnisdrähte hat sein Team zu Strängen gebündelt. „Mehrere Drähte geben durch die größere Oberfläche mehr Wärme ab, dadurch erreichen wir schnelle Kontraktionen. Die Drähte haben die höchste Energiedichte aller bekannten Antriebsmechanismen. Auf kleinem Raum entwickeln sie hohe Zugkraft“, sagt Seelecke. Die Stränge werden wiederum so verbunden, dass sie Beuge- und Streck-Muskulatur nachbilden. Auf diese Weise kann sich der jeweilige Roboterarm fließend bewegen.
Beispielsweise für endoskopische Anwendungen in der Medizin ließen sich nach diesem Prinzip Tentakel gestalten, die nach Aussage der Forscher schon mit einem Durchmesser von 300 bis 400 Mikrometern auskämen. Sie könnten etwa als Führungsdraht bei Herzoperationen eingesetzt werden oder für Magen- und Darmspiegelungen zum Einsatz kommen. Denn trotz dieses geringen Durchmessers lassen sie sich präzise steuern und können mehrere Funktionen erfüllen. Unter anderem ist es denkbar, dass die Spitze Stoßbewegungen durchführt. Dafür müssen die Forscher allerdings Bewegungsmuster modellieren und auf einen Halbleiterchip programmieren. Zusätzliche Sensoren werden nicht benötigt, weil die Drähte selbst die notwendigen Informationen liefern. Vereinfacht gesagt, erkennt die Steuerungseinheit anhand der Messdaten des elektrischen Widerstandes zu jeder Zeit die genaue Position und Ausrichtung der Drähte und kann diese entsprechend beeinflussen.
Neue Technik ist skalierbar für die Produktion großer Roboterarme
Ein weiterer Vorteil ist mit den neuen biegsamen Roboterarmen verbunden: Sie lassen sich alleine durch den fließenden Strom bewegen, was sie von herkömmliche Roboterarmen unterscheidet. Denn die werden in der Regel über Elektromotoren, Druckluft oder Hydraulik bewegt. Dementsprechend sind die Greifer aus Formgedächtnisdraht leichter und im Betrieb leiser. Laut Seelecke ließen sie sich zudem günstig herstellen. Neben der Medizin seien viele weitere Anwendungsgebiete denkbar, weil die Technik der Roboter-Rüssel skalierbar sei. Jetzt suchen die Forscher Industriepartner, um dieses System weiterentwickeln zu können.
Weitere Beiträge zu Entwicklungen in der Robotik:
Ein Beitrag von:















