Wie ein Tauchroboter Müll aus den Ozeanen fischt
Wie ein Hightech-Roboter Müll aus den Meeren fischt: Die TUM zeigt, wie KI, Unterwasserroboter und Drohnen unsere Häfen sauber halten könnten.

Tauchroboter für die Umwelt: Autonome Müllentsorgung unter Wasser.
Foto: Andreas Schmitz / TUM
Müll in den Ozeanen ist ein riesiges Problem – und jetzt gibt es technische Hilfe. Ein Forschungsteam der Technischen Universität München (TUM) hat im Rahmen des EU-Projekts SEACLEAR einen autonomen Tauchroboter entwickelt, der Müll selbstständig erkennt und einsammelt. Mit künstlicher Intelligenz analysiert der Roboter Objekte über Ultraschall und Kameras, greift sie und bringt sie an die Wasseroberfläche. Im Hafen von Marseille in Südfrankreich zeigte die Unterwasser-Müllabfuhr nun erstmals öffentlich, was sie kann.
In vielen Häfen weltweit holen Taucher regelmäßig E-Scooter, Fahrräder, Fischernetze oder alte Reifen aus dem Wasser. In Dubrovnik entdeckten Forscher auf gerade einmal 100 Quadratmetern mehr als 1.000 Müllteile. Bald könnte eine autonome Müllentsorgung die Arbeit übernehmen: Das System besteht aus einem unbemannten Serviceboot mit Beiboot, einer Drohne, einem kleinen Unterwasser-Suchroboter und dem TUM-Tauchroboter. Laut Dr. Stefan Sosnowski vom Lehrstuhl für Informationstechnische Regelung der TUM rechnet sich der Einsatz des Unterwassermüllroboters bereits ab einer Wassertiefe von 16 Metern.
So funktioniert die Mülljagd unter Wasser
Das Serviceboot versorgt die Unterwasserroboter über ein Kabel mit Strom und Daten. Gleichzeitig sendet es Ultraschallwellen aus, um den Meeresboden grob zu kartieren. Ein etwa 50 Zentimeter langer Suchroboter scannt den Boden dann schnell und effizient. Mit diesen Informationen taucht das TUM-U-Boot, das von acht Mini-Turbinen angetrieben wird, gezielt zu den Müllstellen ab. Dort greift es die Gegenstände und lädt sie per Seilwinde auf ein zusätzliches autonomes Beiboot, das wie ein schwimmender Müllcontainer funktioniert.
Der Unterwasserroboter der TUM ist mit einem Greifer ausgestattet und verfügt über besondere Fähigkeiten. Er kann Müllobjekte erkennen, sie in 3D darstellen und so gezielt greifen. „Da wir den Müll zunächst identifizieren müssen und das Greifen von Objekten eine hohe Präzision erfordert, haben wir eine Kamera und ein Sonar an Bord, das die Orientierung selbst in trübem Wasser ermöglicht“, erklärt Forscher Sosnowski.


Hier wird Ihnen ein externer Inhalt von youtube.com angezeigt.
Mit der Nutzung des Inhalts stimmen Sie der Datenschutzerklärung
von youtube.com zu.
Müll unter Wasser zu erkennen sei alles andere als einfach, weil es kaum Bildmaterial gebe, das für die KI als Lerngrundlage dienen könne, erklärte Sosnowski. Deshalb hätten die Projektpartner bisher über 7.000 Bilder „gelabelt“ – also als Objekte markiert, die nicht auf den Meeresboden gehören. Sobald der Müll identifiziert sei, wandelt die KI die Aufnahmen in 3D um. Das sei wichtig, um genau zu wissen, wo der Roboter das Objekt sicher greifen könne, fügte Sosnowski hinzu.

Die Forschenden der TUM Nicolas Hoischen, Zara Zothabayeva, Tau-Yuan Huang und Hanisch Grant (von links nach rechts) vor dem Tauchroboter der TUM.
Foto: Andreas Schmitz / TUM
Stark, aber vorsichtig: So arbeitet der Greifer
Der Greifer des TUM-Tauchroboters ist stark, aber trotzdem feinfühlig. Wenn er zugreift, muss niemand Angst haben, dass ein Plastikeimer zerbricht oder eine Flasche zersplittert. Die vierfingrige „Riesenhand“ kann mit 4.000 Newton drücken und Gegenstände bis zu 250 Kilogramm heben. Gleichzeitig erkennen spezielle Sensoren, wie viel Kraft nötig ist, um die Objekte schonend zu greifen.
Obwohl sich das TUM-Boot autonom bewegt, ist es über ein Kabel mit Strom und Daten verbunden. Eine Batterie an Bord würde nur etwa zwei Stunden halten. Durch das Kabel kann die KI außerdem leistungsfähiger arbeiten – und es dient zugleich als Seil, um schwere Gegenstände aus dem Wasser an die Oberfläche zu ziehen.
Der 120 Kilogramm schwere Tauchroboter ist von Auftriebsschaum umgeben, der ihn im Wasser wie in einem Schwebezustand hält, solange die Mini-Turbinen nicht laufen. Das sorgt dafür, dass sich der Unterwasserroboter frei und präzise bewegen kann – ein wichtiger Punkt, damit er sich laut Forscher Sosnowski genau an die Objekte herantrauen kann.
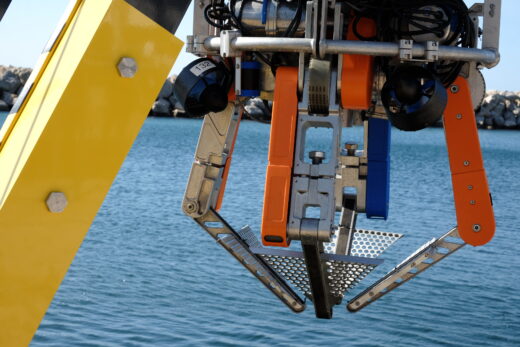
Der Greifer des TUM-Tauchroboters erkennt Müll, greift ihn präzise und schonend – selbst bei schwerem oder zerbrechlichem Unterwasser-Abfall.
Foto: Andreas Schmitz / TUM
Ein Beitrag von: