Außerirdisches Leben: Tauchroboter probt in Schweden für Mission auf Jupitermond
Autonome Tauchroboter werden in Schweden unter Eis getestet, um Missionen zu Jupitermonden wie Europa vorzubereiten und Hinweise auf Leben zu finden.
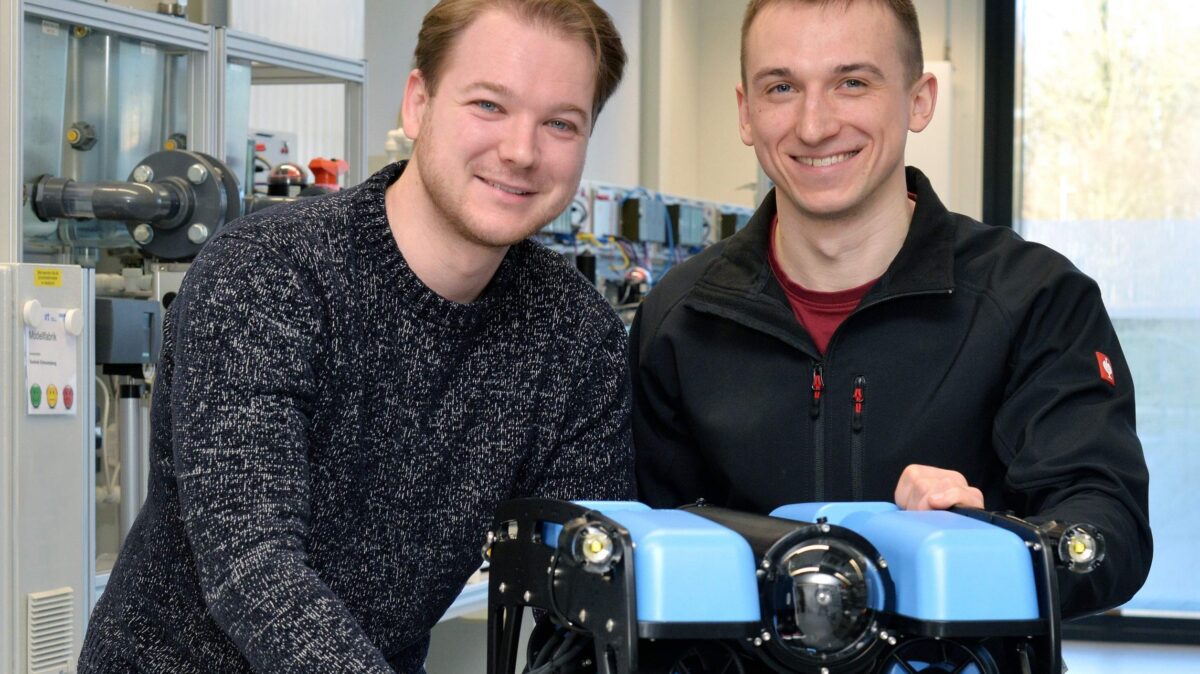
Johannes Löser (li.) und Florian Joppe vom Institut für Regelungstechnik der RWTH Aachen sind für die autonome Navigation der Tauchroboter zuständig. Die Technik soll bei der Erkundung des Jupitermondes Europa eingesetzt werden.
Foto: RWTH Aachen, Andreas Schmitter
Forschende vermuten auf Planeten in unserem Sonnensystem riesige Ozeane. Darin erhoffen sie sich Hinweise auf extraterrestrisches, also außerirdisches Leben. Dazu wollen sie unter die kilometerdicken Eisschichten des Jupitermondes Europa und des Saturnmondes Enceladus blicken. Ein autonomer Tauchroboter soll sie ihrem Ziel näher bringen.
Worauf es beim Einsatz ankommt, erprobt ein Team der RWTH Aachen seit einigen Monaten in der Polarregion. Ihr Testgebiet ist ein zugefrorener See in der Nähe einer kleinen Forschungsstation im schwedischen Abisko. Hier ist die Eisschicht zwar nicht kilometerdick, dafür gibt es Bohrlöcher für Tauchfahrten in eisige Tiefen.
Inhaltsverzeichnis
Autonome Navigation für den Robotereinsatz im Eis
Die Mission der Forschenden des Instituts für Regelungstechnik (IRT) der RWTH: Sie testen im Rahmen des TRIPLE-GNC-Verbundprojekts das Navigationssystem eines autonomen Tauchroboters. Das Kürzel steht für „Technologies for Rapid Ice Penetration and subglacial Lake Exploration“. In Schweden arbeiten sie dabei mit weiteren Partnern der TRIPLE-Projektlinie des Deutschen Zentrums für Luft- und Raumfahrt zusammen. Technisch besteht das Konzept aus einem vollautonomen Kleinst-Tauchroboter (nanoAUV) mit seiner teilautonomen Eisschmelzsonde (IceCraft) sowie einem astrobiologischen Labor (AstroBioLab). Letzteres dient zur Untersuchung von Flüssigkeitsproben.
Für Florian Joppe, Leiter der Navigationsgruppe des IRT, ist die Erprobung in Schweden ein besonderer Meilenstein. Er ist seit Oktober 2024 Teil des Projekts. In Abisko hat er die Feldtestleitung inne. Er sagt zur Zusammenarbeit mit den Partnern: „Wir arbeiten im Bereich Guidance, Navigation und Control sehr eng zusammen. Das heißt, wir entwickeln die Software, die für das autonome Fahren des Fahrzeugs zuständig ist. Das Fahrzeug selbst wiederum wird von anderen Partnern entwickelt, die im Projekt TRIPLE-nanoAUV2 im Bereich Unterwasser-Technologie arbeiten.“ Die Sensorik für die Wasseranalyse liefert das Team des Projekts TRIPLE-LifeDetect.
Eismonde als Ziel: Exploration von Gewässern unter Eis per Roboter
In der Beschreibung des TRIPLE-Projekts heißt es: „Im Vorhaben werden Schlüsseltechnologien für Explorationssysteme von Gewässern unter Eis mit Blick auf die kontaminationsfreie Exploration der Eismonde entwickelt, die an die Grenzen der heutigen Technologien stoßen.“ Für die Beteiligten ist schon die Erprobung in der schwedischen Polarregion eine Grenzerfahrung. Hier schlägt das Wetter manchmal blitzartig um. Auf strahlenden Sonnenschein folgt dann z. B. innerhalb von Minuten ohrenbetäubender Wind. Dadurch peitschen Eiskristalle durch die Luft. Eine gute Vorbereitung ist deshalb gefragt.
Auch für die Technik gibt es in der eisigen Umgebung besondere Herausforderungen. An der Eisschicht reflektieren beispielsweise die akustischen Signale, die für die Navigation genutzt werden. Die möglichen Auswirkungen auf den Betrieb stehen daher im Hauptfokus der Testfahrten.


Einen Termin für die Erprobung der Systeme im All gibt es zwar noch nicht. Dafür ist bereits eine weitere Zwischenstation vorgesehen. An der Neumayer III-Station in der Antarktis steht ein weiterer wichtiger Moment für die Mobilitätsgruppe des IRT an. Johannes Löser, der dafür die Verantwortung trägt, sagt dazu: „Dort sollen auch Guidance and Control, das heißt Themen wie die Pfadplanung, die Regelung der Aktuatoren und das Andocken an die Basisstation, validiert werden.“
Die autonomen Tauchroboter können auch auf der Erde hilfreich sein
Unabhängig vom geplanten Einsatz auf einem der Eismonde konnten die Forschenden nach eigener Schilderung bereits jetzt viel aus dem Projekt mitnehmen. In der Zeit im Norden Schwedens sei ein starkes Gemeinschaftsgefühl entstanden. „Die Ergebnisse des Projekts haben bereits jetzt auf der Erde Perspektive. Von Überwachung kritischer Infrastruktur bis hin zur Erforschung subglazialer Seen gibt es viele denkbare Einsätze für die entwickelte Technologie“, hebt Joppe hervor. Ursprünglich hat er Luft- und Raumfahrttechnik studiert.
Löser fügt hinzu: „Diese Vielfalt an Einsatzmöglichkeiten beruht auf der Fahrzeugunabhängigkeit des GNC-Systems. Dadurch ist die Implementierung in verschiedenster Form auf variablen Fahrzeugtypen realisierbar, um somit unterschiedlichste Anforderungen abzudecken.“ Die autonome Mobilität und Navigation zählen generell zu den Tätigkeitsfeldern des Instituts für Regelungstechnik der RWTH Aachen. Dazu zählen u. a. die Entwicklung autonomer Fähren und selbstständig fahrender Trucks für den Bergbau oder Lösungen für Drohnen.
Der Beitrag wurde mit Informationen von der RWTH Aachen erstellt.
Ein Beitrag von: