Schlangenroboter aus Chemnitz kann Tragflächen montieren
Die 3000 Schrauben in der Tragfläche eines Airbus A330 anzuziehen, dauert lange. Und ist vor allem anstrengend. Jetzt entwickeln Chemnitzer Ingenieure einen Roboter, der so beweglich ist, dass er sogar in entlegende Stellen einer Tragfläche kriechen und Schrauben befestigen kann. Das soll den Flugzeugbau beschleunigen.

Montage an der Tragfläche eines A330 in Toulouse: 3000 Schrauben müssen in nur einer Tragfläche angezogen werden. Ein neuer, sehr flexibler Roboter soll einen Teil dieser Aufgabe übernehmen.
Foto: Airbus
Allein von seinem Langstreckenflieger A330 hat Airbus weit über 1000 Stück verkauft. 3000 Passbohrungen müssen in jeder Tragfläche ausgeführt werden. Macht 6000 bei zwei Tragflächen und sechs Millionen Bohrungen samt Verschraubung bei 1000 Flugzeugen. In Handarbeit.
Schwerstarbeit der Monteure in den Tragflächen
Die Monteure kriechen durch enge Löcher von nur 45 mal 25 Zentimetern und winden sich durch das Innere der Flügel, um dort die Tragflächenkomponenten mit Passschrauben zu befestigen. Zugleich müssen sie auch noch unzählige Nahtstellen abdichten. Die Arbeit ist zeitaufwändig, körperlich anstrengend und ermüdend. Hinzu kommen gesundheitliche Belastungen durch Dämpfe, die beim Abdichten entstehen. Ein Roboter, der diesen Job übernehmen kann, wäre ein großer Effizienzgewinn.
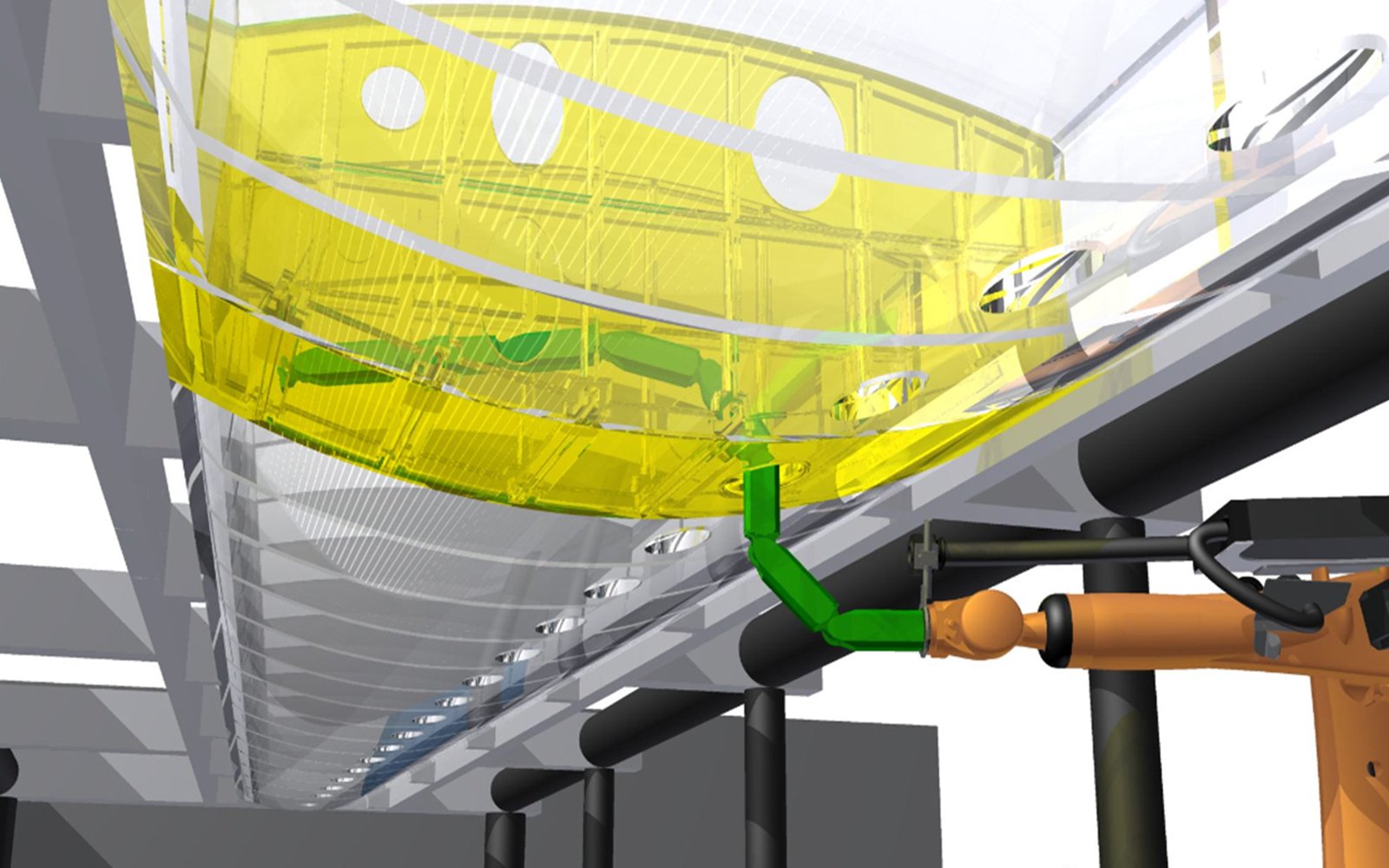
Wie eine Schlange windet sich der Roboter mit seinen acht Kipp- und Drehgelenken durch die enge Öffnung in den Innenraum der Tragfläche. Dadurch erreicht er auch hinterste Winkel der Kammer.
Quelle: Fraunhofer IWU
Das Problem: Herkömmliche Industrieroboter kommen nicht durch die engen Öffnungen, durch die sich gerade mal ein recht schlanker Mensch zwängen kann. Außerdem sind ihre Glieder zu starr. Ein Montageroboter für Tragflächen müsste zudem verschränkungsfähig sein, soll heißen: Die einzelnen Gelenke bleiben stabil in Position, während eines von ihnen den Andockpunkt für seine Arbeit anpeilt.
Flexibler Roboter mit acht kleinen Motoren in den Gelenken
Ein solches Modell mit beweglichen Gliedern entwickeln derzeit Forscher am Fraunhofer-Institut für Werkzeugmaschinen und Umformtechnik IWU in Chemnitz. „Der Roboter besteht aus acht Achsgelenken. Durch die seriell verketteten kurzen Dreh- und Kippgelenke kann er sehr enge Bahnradien abfahren und sich in die entlegensten Ecken der Kammern schlängeln. Wir nennen ihn auch Schlangenroboter“, erklärt Marco Breitfeld, zuständiger Projektleiter am IWU.
Schlangenroboter kann bis zu 15 kg tragen
Am vordersten der acht Glieder kann das Werkzeug oder auch eine Inspektionskamera befestigt werden. Der zweieinhalb Meter lange Roboter ist in der Lage, bis zu 15 Kilogramm schwere Werkzeuge zu tragen. Eine besondere Herausforderung war der Antrieb, der klein sein musste und doch ein ausreichend hohes Drehmoment brauchte.

Produktion eines Flügels des Airbus A350XWB in Broughton: Chemnitzer Forscher entwickeln einen Roboter, der so gelenkig ist, dass er auch in kleinsten Hohlräumen Schrauben anbringen kann.
Quelle: Airbus
Um den Roboter so schlank wie möglich konstruieren zu können, haben die Wissenschaftler in jedem der acht Glieder einen sehr kleinen Motor verbaut – dennoch bringt es der Antrieb auf ein Drehmoment von bis zu 500 Newtonmeter. In Kombination mit Seilzug und Spindeltrieb ermögliche er die hohe Beweglichkeit der einzelnen Glieder, die sich jeweils in einem Bereich von 90 Grad verdrehen lassen, sagt der Projektleiter: „Das Antriebskonzept erlaubt einen Einsatz überall dort, wo hohe Kräfte und Momente auf engstem Raum benötigt werden.“ Die Anwendung sei deshalb nicht nur im Flugzeugbau, sondern auch in der Automobilindustrie oder im Kraftwerksbau denkbar.
Roboter fährt auf mobiler Plattform
Geplant ist, den 60 Kilogramm schweren Roboter auf eine mobile Plattform oder eine Schiene zu montieren, so dass er unter den Tragflächen entlangfahren kann. Derzeit testen die Forscher vom IWU das mechanische Konzept sowie die Steuerung in der Praxis.

Vom 3. bis 6. Juni präsentieren sie auf der Messe Automatica in München einen Demonstrator des Innenraumroboters (Halle B4, Stand 228). Bis Ende 2014 soll ein Komplettaufbau des Systems entstehen.
Ein Beitrag von:














