Roboter-Hund lernt laufen – In nur einer Stunde
Fortbewegung ist für einen Roboter ein sehr komplexes System, aber Forschende orientieren sich jetzt an Jungtieren. Mit einem speziellen Computerprogramm ist es einem Max-Planck-Team gelungen, einem Roboter-Hund in Rekordzeit das Laufen beizubringen.
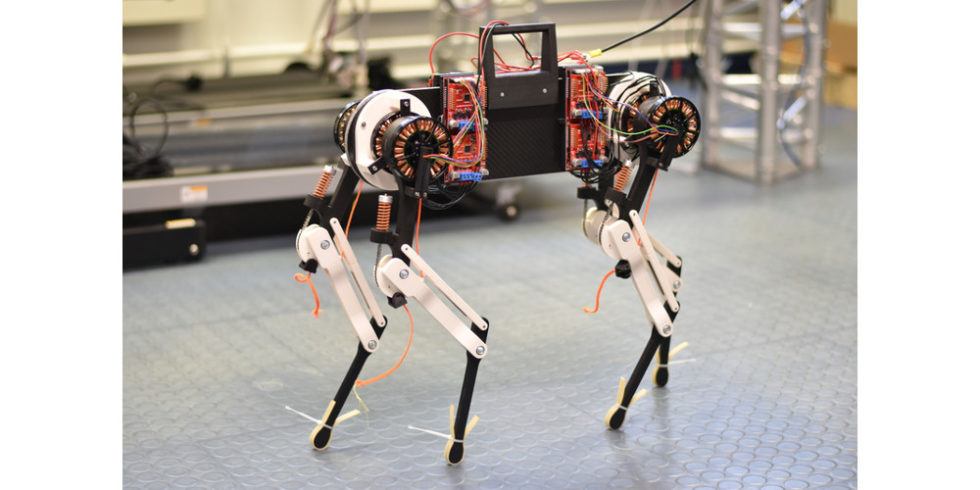
Er sieht einem Hund zwar nur entfernt ähnlich, aber "Morti" kann schon ähnlich laufen.
Foto: Ruppert /Dynamic Locomotion Group
Unablässig sammelt ein Lebewesen über verschiedene Sinne Informationen, um sich im Raum fortbewegen zu können. Unter anderem die Daten von Gleichgewichtsorgan, Augen und Tastsinn wertet das Gehirn, vereinfacht gesagt, aus, um die richtigen Impulse an zig verschiedene Muskeln zu senden. Wie perfekt dieses System ist und wie komplex, wird erst deutlich, wenn man versucht, es nachzubauen. Dafür gibt es viele verschiedene Ansätze. Wissenschaftlerinnen und Wissenschaftler vom Max-Planck-Institut für Intelligente Systeme (MPI-IS) in Stuttgart haben sich neugeborene Tiere angeschaut und versucht, ihr Lernverhalten zu imitieren – mit einem erstaunlichen Ergebnis: Ihr vierbeiniger Hund-Roboter lernte in nur einer Stunde das Laufen.
Roboter lernt über Algorithmus aus Fehlern
Wer sich ein Fohlen oder eine neugeborene Giraffe ansieht, staunt. Denn so ungelenk die Tiere zunächst aussehen, es gelingt ihnen erstaunlich schnell, erst aufzustehen und dann loszulaufen. Natürlich dauert es seine Zeit, bis die Koordination aller Muskeln und Sehnen perfekt funktioniert. Aber die Reflexe helfen ihnen dabei, Schwankungen auszugleichen und nicht sofort wieder hinzufallen und sich zu verletzen. Für sie ist diese Fähigkeit überlebenswichtig. Denn schon wenige Stunden nach der Geburt müssen die Fluchttiere in der Lage sein, mit der Herde mitzuhalten, falls ein Fressfeind sie bedroht. Die Muskelkontrolle wird also geübt, bis das Nervensystem im Rückenmark an die notwendigen Bewegungsmuster angepasst ist.
Doch wie genau erfolgt dieses schnelle Lernen von koordinierten Bewegungen? Und wie lässt es sich auf künstliche Tiere, sprich Roboter, übertragen? Das Team am MPI-IS hat dafür zunächst einen vierbeinigen Roboter gebaut. „Als Ingenieure beziehungsweise Robotiker suchten wir die Antwort, indem wir einen Roboter bauten, der wie ein Tier Reflexe besitzt und aus Fehlern lernt“, sagt Felix Ruppert, ehemaliger Doktorand der Forschungsgruppe Dynamische Lokomotion am MPI-IS. „Wenn ein Tier stolpert, ist das dann ein Fehler? Bei einem Mal nicht. Wenn es aber häufig stolpert, gibt uns das ein Maß dafür, wie gut das Laufen funktioniert.“
Künstliche Intelligenz im Roboter ahmt natürliches Lernverhalten nach
Herzstück des künstlichen Hundes ist ein sogenannter bayesian optimization Lernalgorithmus: In den Füßen des Roboters sind Sensoren untergebracht. Sie sammeln Informationen ein (Ist-Daten), die wiederum mit den Soll-Daten abgeglichen werden. Diese Soll-Daten entsprechen im Grunde dem virtuellen Rückenmark. Das Konzept besteht also darin, dass der Roboter die Struktur der gesendeten Bewegungsmuster kontinuierlich an die Sensorinformationen angleicht.
Der Lernalgorithmus – die künstliche Intelligenz (KI) – steuert wiederum einen künstlichen Central Pattern Generator (CPG) (zentralen Bewegungsmuster-Generator). Bei solchen Mustergeneratoren handelt es sich bei echten Lebewesen um Netzwerke aus Nervenzellen im Rückenmark, die ohne Einfluss des Gehirns rhythmische Muskelkontraktionen veranlassen. Anders gesagt: Das Gehirn ist nicht an jeder einzelnen, selbstverständlichen Bewegung direkt beteiligt. Das ist sehr wichtig für die Effizienz. Bei neugeborenen Tieren funktionieren genau diese CPGs noch nicht ausreichend. Eine junge Giraffe kann zwar über eine ebene Fläche laufen, kommt aber ins Wanken, wenn der Untergrund wechselt. Hier schalten sich Reflexe hinzu und passen die Bewegungsmuster an. Anschließend wird wieder in den normalen CPG-Modus gewechselt. Hört das Stolpern nicht auf, werden die Bewegungsmuster nachhaltig verändert.
Roboter-Hund hat wenig Energiebedarf
Nach dem gleichen Prinzip lernt „Morti“, der Roboter-Hund. Allerdings braucht er dafür nur eine Stunde. Mortis CPG wird in einem kleinen Computer simuliert. Bei Problemen passt er die Bewegung der Beine an, die neue Daten der Sensoren zurückschicken. Gegebenenfalls ändern sich die Bewegungsmuster dauerhaft – und Morti lernt laufen.


Dabei ist der Roboter-Hund übrigens ausgesprochen effizient. Nach Angaben der Forschenden verbraucht er lediglich fünf Watt. Gleichzeitig liefert er wichtige Informationen über die Anatomie von Tieren.
Mehr zum Thema Robotik:
- Roboterverkäufe in Nordamerika wachsen zweistellig
- Roboter sicherer und effizienter einsetzen – dank 5G-Netzen von Siemens
- Roboter lernen schneller: Mit 3D-Geometrie in 10 Minuten zum Erfolg
Ein Beitrag von:













