Fast wie ein Mensch: Roboterhand packt zu!
Industrielle Roboter sind Spezialisten, keine Allrounder. Das könnte sich bald ändern: MIT-Forschende zeigen, wie eine Roboterhand 2.000 verschiedene Objekte neu ausrichtet, um sie anzufassen.
Wie gelingt es, dass eine Roboterhand Gegenstände besser greift (Symbolbild)?
Foto: panthermedia.net/AndreyPopov
Mit nur einem Jahr sind Babys geschickter als industriell eingesetzte Roboter. Sie greifen Gegenstände in unterschiedlichen Formen, Farben und Größen, lernen aber auch, Objekte abzulegen und zu sortieren. Schon lange versuchen Ingenieurinnen und Ingenieure, solche Eigenschaften auf eine Roboterhand zu übertragen, bislang ohne durchschlagenden Erfolg.
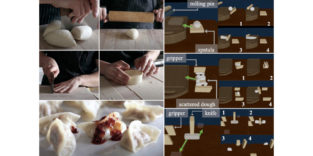
Jetzt ist Forschenden am Computer Science and Artificial Intelligence Laboratory (CSAIL) des Massachusetts Institute of Technology (MIT) ein Durchbruch gelungen. Sie haben ein System entwickelt, das mehr als 2.000 verschiedene Objekte neu ausrichten kann, wobei die Roboterhand sowohl nach oben als auch nach unten zeigt. Diese Fähigkeit, Gegenstände zu manipulieren, von einer Tasse über eine Thunfischdose bis hin zu einer Schachtel mit Keksen, könnte der Hand dabei helfen, Objekte schnell auf bestimmte Art und Weise und an bestimmten Orten zu platzieren. Einmal Gelerntes ließe sich auf völlig unbekannte Objekte übertragen, hoffen die Forschenden.
Komplexe Veränderungsprozesse: Entscheidet der Faktor Mensch über den MRK-Erfolg?
Bekannte Probleme bei Roboterhänden
Zum Hintergrund: „In der Industrie wird am häufigsten ein Greifer mit parallelen Backen verwendet, teilweise wegen seiner einfachen Steuerung, aber auch, weil Roboter nicht in der Lage sind, viele Werkzeuge zu verwenden, die wir im täglichen Leben nutzen“, sagt Tao Chen, Doktorand am MIT CSAIL. „Sogar die Verwendung einer Zange ist schwierig, weil sie einen Griff nicht geschickt hin und her bewegen.“
Eine Neuausrichtung von Objekten in der Hand des Roboters gilt als schwieriges Problem, weil viele Motoren gesteuert werden müssen und weil sich Kontakte zwischen den Fingern und den Objekten häufig ändern. Noch kniffliger wird das Problem, wenn die Hand nach unten gerichtet ist. Der Roboter muss nicht nur das Objekt bewegen, sondern auch die Schwerkraft überwinden, damit ein Gegenstand nicht herunterfällt.
Mit künstlicher Intelligenz Bewegungsmuster optimieren
Ingenieurinnen und Ingenieure am MIT fanden heraus, dass ein vergleichsweise simpler Ansatz komplexe Probleme der Roboterhand lösen kann. Sie verwendeten einen Algorithmus des bestärkenden oder verstärkenden Lernens, auch reinforcement learning genannt. Bei der Methode des maschinellen Lernens versucht ein System anhand von Aktionen eine möglichst große virtuelle Belohnung zu erhalten. Es weiß jedoch nicht, welche Handlung in einer Situation – bei einem bestimmten Objekt – zum bestmöglichen Ziel führt.
Der besondere Ansatz war eine „Lehrer-Schüler“-Trainingsmethode. Das „Lehrer“-Netzwerk wurde anhand von Informationen über Objekte und den Roboter selbst trainiert, die in Simulationen leicht verfügbar sind, aber nicht in der realen Welt. Dazu zählten etwa die Position der Fingerspitzen in einem Koordinatensystem oder die Geschwindigkeit des Objekts.
Um sicherzustellen, dass ein Roboter auch außerhalb der Simulation arbeiten kann, wird das Wissen des „Lehrers“ mit experimentell erhobenen Daten des „Schülers“ in Einklang gebracht. Die MIT-Forschergruppe arbeitete mit Tiefenbildern von Kameras. Hinzu kamen die Objektposition und die Gelenkpositionen des Roboters. Es wurde auch ein „Schwerkraft-Lehrplan“ verwendet, bei dem der Roboter Fähigkeiten zunächst in einer hypothetischen Umgebung ohne Schwerkraft erlernt und die Steuerung dann langsam an die normale Schwerkraft anpasst.
Roboter greifen Objekte mit bis zu 100% Erfolg
Ein einziger Controller, das „Gehirn“ des Roboters, konnte eine große Anzahl von Objekten neu orientieren, die er zuvor noch nie gesehen hatte, und das ohne Kenntnis der Form. Bei vielen kleinen, kreisförmigen Objekten wie Äpfeln, Tennisbällen oder Murmeln lagen die Erfolgsquoten bei nahezu 100%, wenn sie mit der Hand nach oben und unten neu ausgerichtet wurden. Die niedrigsten Erfolgsquoten traten wenig überraschend bei komplexeren Objekten wie einem Löffel, einem Schraubenzieher oder einer Schere auf. Sie bewegten sich in der Größenordnung von etwa 30%. Da die Erfolgsquoten je nach Form des Objekts variierten, könnte das System in Zukunft auf der Grundlage häufig vorkommender Objektformen trainiert werden, um andere Gegenstände besser zu erkennen, hoffen die Forschenden.
Eine intelligente Roboterhand bald auch in der Medizin?
Weitere Anwendungen des Modells jenseits der Industrie sind ebenfalls denkbar. Bereits im August 2021 haben MIT-Ingenieurinnen und -Ingenieure eine weiche, leichte und potenziell kostengünstige neuroprothetische Hand für Menschen vorgestellt. Amputierte, die das künstliche Glied testeten, führten tägliche Aktivitäten wie das Schließen eines Koffers, das Einschenken eines Saftkartons und das Streicheln einer Katze genauso gut aus – und in einigen Fällen sogar besser – als Personen mit steiferen Neuroprothesen. Das neue Design ist auch überraschend langlebig. Es würde aber auch von innovativen Algorithmen der Roboterhand profitieren.
Mehr zum Thema Robotik:

- Von mobilen Robotern und nachhaltigen Antriebskonzepten
- Deutschland auf Platz 5 des weltweiten Robotermarktes
- Roboter springt wie Gepard: Ingenieure entwickeln Bahnbrechendes
Ein Beitrag von: