Härtetest: Roboter simulieren in der Wüste eine Marsmission
Bald werden die Rover SherpaTT und Coyote III ihre Heimat in Bremen mit der kargen Wüste des US-Bundesstaates Utah tauschen müssen. Ihre Mission: Einsätze auf dem Mars simulieren. Das soll auch dazu beitragen, Roboter auf der Erde zum Beispiel in nach Industrieunfällen kontaminierten Gebieten autonom arbeiten lassen zu können.
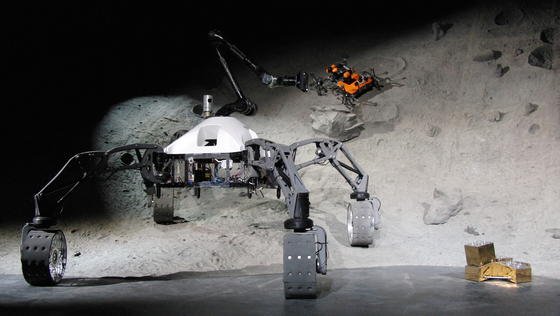
Die am Weltraumszenario beteiligten mobilen Systeme SherpaTT (vorne), Coyote III (hinten im Krater) und die Basisstation mit aufgestecktem Nutzlastmodul (re.).
Foto: DFKI/Florian Gordes
Willkommen auf dem irdischen Mars: Vom 24. Oktober bis 18. November 2016 testen Bremer Wissenschaftler vom Robotics Innovations Center am Deutschen Forschungszentrum für Künstliche Intelligenz (DFKI) die Zusammenarbeit verschiedener robotischer Systeme in der Halbwüste des US-Bundesstaats Utah.

Sieht aus wie auf dem Mars, ist aber die abgelegene felsige Wüstenlandschaft in Utah, wo das Deutsche Forschungszentrum für Künstliche Intelligenz (DFKI) demnächst den Rover SherpaTT und den Mini-Roboter Coyote III testen wird.
Quelle: DFKI/Florian Gordes
Die karge felsige Gegend dort ist besonders gut für simulierte Marsmissionen geeignet, denn dort herrscht extremes Steppenklima. Es gibt meist heiße Sommer um die 30 °C und häufig kalte Winter mit eisigen Minustemperaturen. Schon seit fünf Jahren betreibt die Mars Society im Süden Utahs nahe der Kleinstadt Hanksville die Mars Desert Research Station. In dieser Forschungsstation mit Weltraum-Habitat werden regelmäßig bemannte Marsaufenthalte simuliert.
Ergebnisse werden auf irdische Anwendungen übertragen
Nun sollen es die Roboter SherpaTT und Coyote III sein, die sich auf dem simulierten Mars herumtreiben. In dem vom Deutschen Zentrum für Luft- und Raumfahrt (DLR) geförderten Feldtest in Utah testen die Forscher vom DFKI erstmals die Mars-Missionsabläufe in einer natürlichen realitätsnahen Umgebung. Die Ergebnisse fließen in das Vorhaben TransTerrA ein, in dem für Weltraummissionen entwickelte Systeme auf irdische Anwendungen übertragen werden. Der Grundgedanke dahinter: Ein Roboter, der auf dem Mars zurechtkommt, ist auch für den Einsatz in lebensfeindlichen Umgebungen auf der Erde geeignet, etwa für Missionen in der Tiefsee oder in nach Industrieunfällen kontaminierten Gebieten.
Logistische Kette errichten
Der Schwerpunkt der Tests liegt auf der Simulation einer sogenannten Sample-Return-Mission. Dabei sollen Bodenproben der simulierten Marsoberfläche für Analysen zur Erde zurückgebracht werden. Die Aufgabe der beiden mobilen Roboter wird es sein, eine logistische Kette zu errichten. Dafür stehen ihnen eine Basisstation, die dem Aufladen ihrer Batterien und auch der Datenübertragung dient, und zusätzliche Nutzlastmodule zur Verfügung.
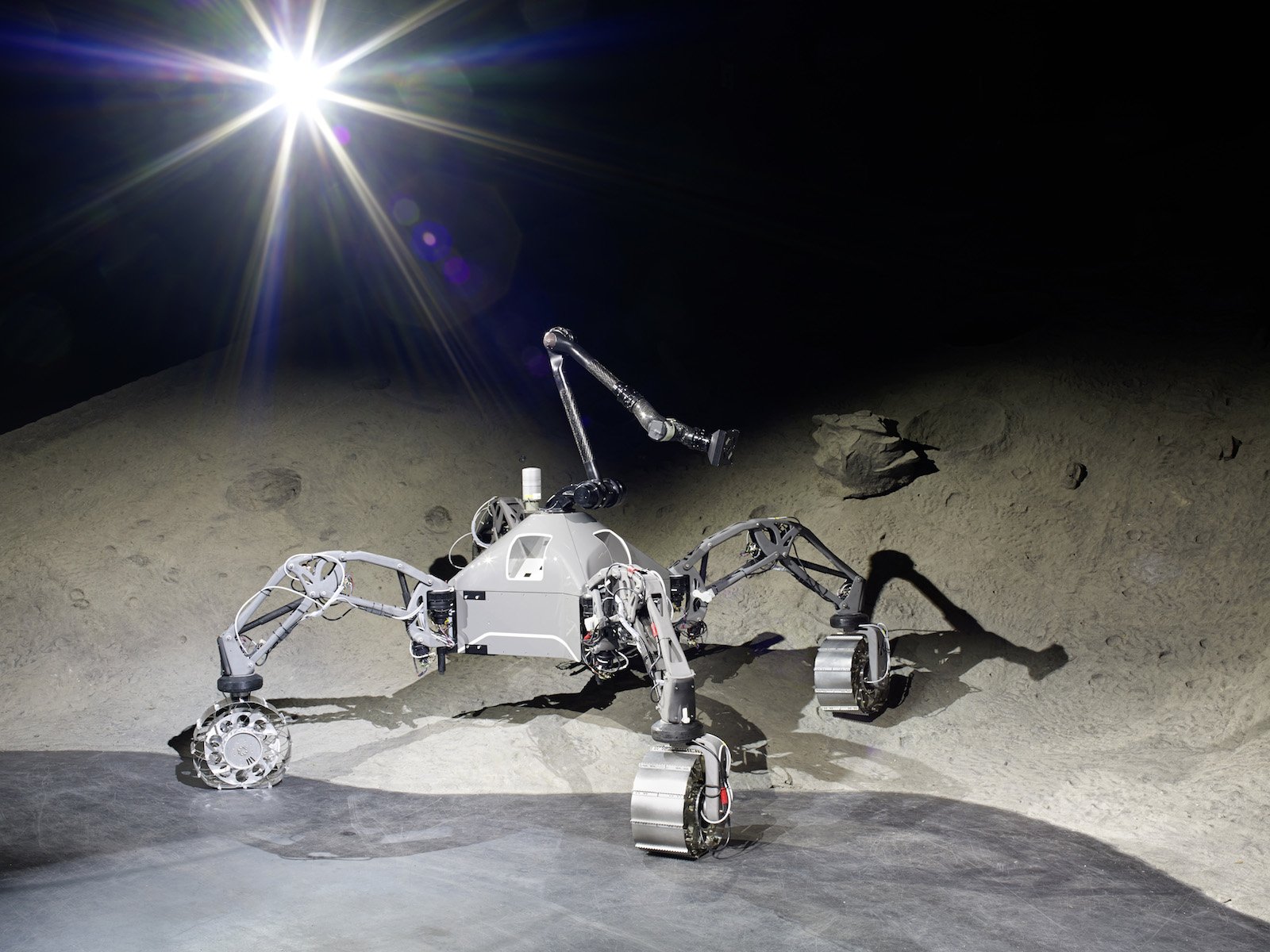
Schon mal zuhause geübt: SherpaTT in der Weltraumexplorationshalle des DFKI in Bremen. Der hybride Rover kann schreiten und fahren. Lasten tragen gehört auch zu seinen Aufgaben, wie sein Name schon vermuten lässt.
Quelle: DFKI/Henrik Spohler
SherpaTT ist ein Schreit- und Fahrrover, der dank seines aktiven Fahrwerks selbst schwierigstes Gelände mühelos überwindet. Er ist auch eine Art Lasttier, denn er kann auf seinen Erkundungsrunden größere Nutzlasten wie zusätzliche Sensorik, Akkus oder Werkzeuge transportieren. Mit seinem Roboterarm kann SherpaTT auch die Bodenproben nehmen, die später zur Erde zurückgebracht werden sollen. SherpaTT ist ein Künstler der Vielseitigkeit: Der Rover ist mit mehreren elektro-mechanischen Schnittstellen bestückt, mittels derer er sich an die verschiedensten Missionsszenarien anpassen kann.
Coyote III: Wieselflink und klein
Sparringpartner für SherpaTT ist der kleine Mikro-Rover Coyote III, der sich mit seiner Sternradkonstruktion wieselflink im unwegsamen Gelände bewegen kann. Auch der Coyote III ist mit Sensoren für die autonome Erkundung der Umgebung und mit zusätzlichen Schnittstellen ausgestattet, die zum Beispiel das Andocken von Manipulatoren und weiteren Nutzlastmodulen ermöglichen.

Roboter Coyote III auf Testfahrt in der DFKI-Weltraumexplorationshalle. Sieht auf dem Foto größer aus, als er ist.
Quelle: DFKI /Annemarie Popp

Coyote III wird während der Feldtestkampagne in Utah die Rolle eines Shuttles übernehmen, das die entnommenen Bodenproben einsammelt und zur Landestation transportiert.
Operator steckt im Oberkörper-Exoskelett
So ganz autonom sind SherpaTT und Coyote III allerdings während ihres simulierten Mars-Aufenthalts nicht: Phasenweise erfolgt die Kontrolle des Missionsablaufes ferngesteuert aus Bremen per Satellitenlink über eine am Robotics Innovations Center errichtete Kontrollstation. Ein menschlicher Operator steckt dafür in einem tragbaren Oberkörper-Exoskelett und steuert die beiden Rover, damit die Marsmission nicht aus dem Ruder läuft.
Ein Beitrag von:












