Roboter für den Weltraum: ETH-Studierende bauen vierarmigen Humanoiden
Astronauten verbringen rund ein Drittel ihrer Arbeitszeit mit Wartung. Roboter „Helios“ von der ETH Zürich soll das ändern. Dabei kommen ihm seine vier Arme zugute.
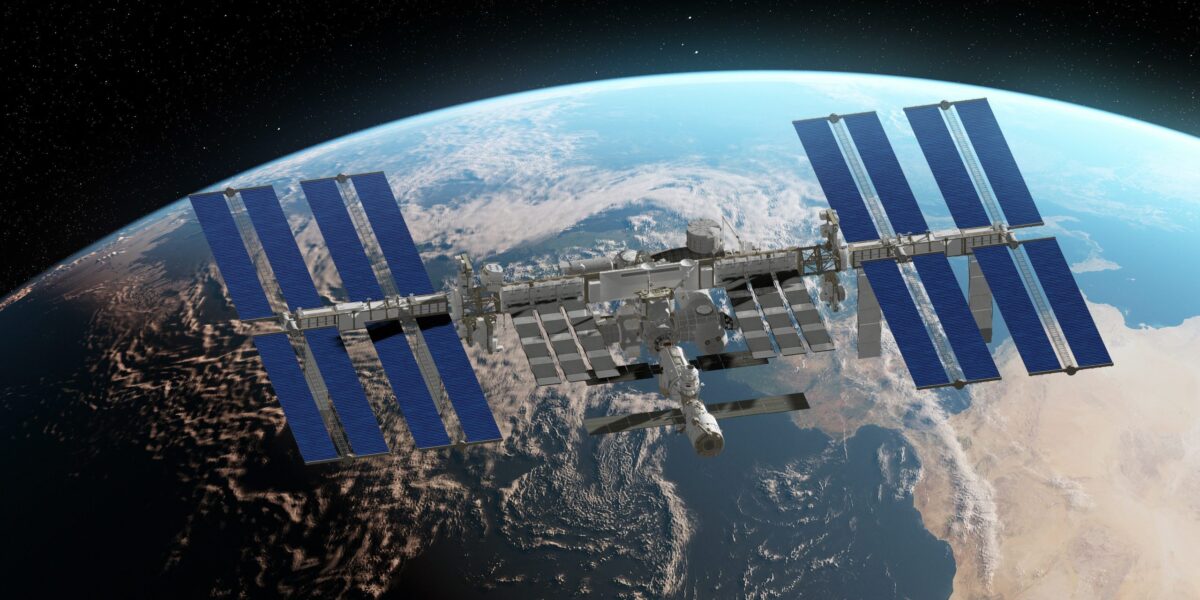
Noch arbeiten Menschen auf Weltraumstationen wie der ISS. Auf künftigen Stationen könnten sie durch Roboter ersetzt werden.
Foto:
Ein humanoider Roboter mit vier Armen, ohne zweibeinige Fortbewegung und mit einer Mechanik, die eher an menschliche Sehnen erinnert als an klassische Industrieaktoren: Das Studierendenprojekt Orbit Robotics an der ETH Zürich hat seinen ersten Prototyp Helios in einem Teaser-Video vorgestellt.
Die offizielle Vorstellung soll am 27. Mai 2026 im Rahmen des jährlichen ETH-Fokus-Rollouts stattfinden.
Der Grund für die Bauform: Helios soll nicht auf der Erde arbeiten, sondern in der Schwerelosigkeit zukünftiger Raumstationen. Dort ist zweibeiniges Gehen wertlos; Astronautinnen und Astronauten bewegen sich vor allem, indem sie sich an Haltegriffen entlangziehen. Mithilfe seiner vier Arme soll sich der Roboter an seiner Umgebung fixieren und zugleich Arbeiten erledigen können.
Inhaltsverzeichnis
Ein Studierendenprojekt im fünften Semester
Orbit Robotics ist kein Start-up oder etablierter Robotikhersteller, sondern ein sogenanntes Fokus-Projekt der ETH Zürich. In diesem Format entwickeln Bachelor-Studierende des Departements Maschinenbau und Verfahrenstechnik im fünften und sechsten Semester über zwei Semester hinweg eigene Produkte. Akademisch betreut wird das Team vom Soft Robotics Lab der ETH unter Prof. Robert Katzschmann.
Das Format hat in den vergangenen Jahren mehrfach Hardware hervorgebracht, die international fand – darunter den vierbeinigen Roboter SpaceBok für planetare Missionen und den Kletterroboter MONKEE. Auch der ANYmal-Roboter aus dem Robotic Systems Lab der ETH wird inzwischen für Marsforschung erprobt. Helios ist die diesjährige Eigenentwicklung für ein Einsatzgebiet, in dem zweibeinige Humanoide aus Sicht des Teams an ihre Grenzen stoßen: den Orbit.



Warum der Roboter vier Arme bestitz
Die Vier-Arm-Architektur ist nach Angaben des Teams kein eine Anpassung auf die Physik der Mikrogravitation. Auf der Erde dienen Beine dem Gehen, dem Heben und dem Tragen von Gewicht. In der Schwerelosigkeit fällt all das weg. Auf eine zweibeinige Fortbewegung verzichten die Entwicklerinnen und Entwickler deshalb bewusst. Stattdessen muss sich ein Roboter aktiv festhalten, um nicht abzudriften. Dafür nutzt er zwei Arme. Mit den anderen beiden kann er gleichzeitig Objekte handhaben oder Arbeiten verrichten.
Klassische Humanoide wie Atlas (Boston Dynamics), Optimus (Tesla) oder Apollo (Apptronik) sind zweibeinig und für den Einsatz auf der Erde optimiert. Auch der bekannteste historische Versuch eines ISS-Roboters, NASAs Robonaut 2, hatte nur zwei Arme – und war zudem an einem festen Sockel verankert.
Mechanik nach dem Vorbild menschlicher Sehnen
Statt rotierender Aktuatoren setzt das Orbit-Team auf einen sogenannten Tendon Drive. Die vier Arme werden über Seile und Umlenkrollen bewegt, ähnlich wie menschliche Muskeln Sehnen ziehen. Die Motoren sitzen nahe an den Schultergelenken. Das verlagert die bewegte Masse Richtung Rumpf und macht die Arme leichter und nachgiebiger. Damit soll feinmotorische Arbeit, die im Orbit anfällt, leichter vonstatten gehen.
Das Ellenbogengelenk ist als Rollkontaktgelenk ausgeführt. Diese Konstruktion erlaubt nach Angaben des Teams eine reibungsarme Bewegung bei zugleich hoher Kraftübertragung. Die fünffingrigen Hände sollen auch filigrane Aufgaben übernehmen können. Ein Großteil der tragenden Strukturteile stammt nach Angaben von Orbit aus dem 3D-Drucker.
Was bereits getestet wurde – und was nicht
Helios hängt bisher in einer Testumgebung an Gurten, die das schwerelose Umfeld einer Raumstation grob nachstellen. In echter Mikrogravitation – etwa in einem Parabelflug oder gar im Orbit – wurde der Roboter bisher nicht erprobt. Zwischen einem Bachelorprojekt-Prototypen und tatsächlicher Flughardware liegen zudem aufwendige Qualifikationsschritte: Strahlenfestigkeit, Brandschutz, Failsafe-Architektur, Outgassing-Verhalten der eingesetzten Kunststoffe.
Für das Team geht es im aktuellen Entwicklungsstadium ausdrücklich nicht um einen einsatzfertigen Weltraumroboter, sondern um eine Plattform, an der mechanische Konzepte für die Schwerelosigkeit erprobt werden.
Nicht für die ISS, sondern für deren Nachfolger
ORBIT spricht explizit von „future space stations and orbital facilities“, also kommerziellen Nachfolge-Stationen. Denn die internationale Raumstation soll nach aktueller Planung der NASA Ende 2030 kontrolliert deorbitiert werden. Ihre Nachfolge übernehmen sollen kommerziell betriebene Stationen wie Axiom Station (Axiom Space, erste Module ab 2028), Orbital Reef (Blue Origin/Sierra Space), Starlab (Voyager Space/Airbus) und Vast Haven-2.
Auf diesem Markt positioniert sich auch die US-Firma Apptronik mit ihrem zweibeinigen Apollo-Roboter, die seit Jahren über SBIR-Verträge mit der NASA zusammenarbeitet und 2025 eine Finanzierungsrunde von über 400 Millionen US-Dollar abgeschlossen hat. Helios würde dort nicht als Erstanbieter starten, sondern als technischer Außenseiter mit einer ungewöhnlichen Bauform.
Die wirtschaftliche Argumentation des Teams orientiert sich an ISS-Erfahrungswerten: Rund 35 Prozent ihrer Arbeitszeit verbringen Astronautinnen und Astronauten dort mit Wartungsaufgaben. Die Astronautenstunde kostet nach Angaben von ORBIT in der Größenordnung von 140.000 US-Dollar. Ein einziger Frachtentladevorgang binde rund 50 Stunden Besatzungszeit.
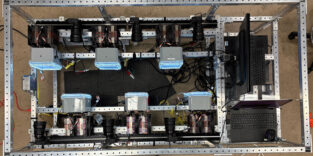
Parallel: Eine zweite Plattform fürs Training
Neben Helios entwickelt das Team mit IKARUS eine zweite Robotik-Plattform, die nach eigenen Angaben in nur zwei Monaten realisiert wurde. IKARUS ist kleiner, weniger spektakulär in der Bauform und dient vor allem als Testumgebung: für Teleoperation, für Imitationslernen und für rasche Hardware-Iterationen. Die Plattform soll dazu beitragen, autonome Aufgaben für Helios zu trainieren, bevor diese auf der vierarmigen Hauptplattform laufen.
Wie weit Helios tatsächlich kommt, hängt nicht zuletzt davon ab, ob das Projekt nach dem Fokus-Rollout weitergeführt wird, etwa als Ausgründung oder als Forschungsprojekt am Soft Robotics Lab. Bei der finalen Enthüllung am 27. Mai dürfte sich genauer zeigen, welche Pläne das Team über sein Bachelorprojekt hinaus verfolgt.
Ein Beitrag von: