Warum diese Roboterhand besser funktioniert als eine menschliche
Greifen ohne Handfläche, Fortbewegung ohne Arm: Diese Roboterhand zeigt, warum Nachahmen nicht immer optimal ist.
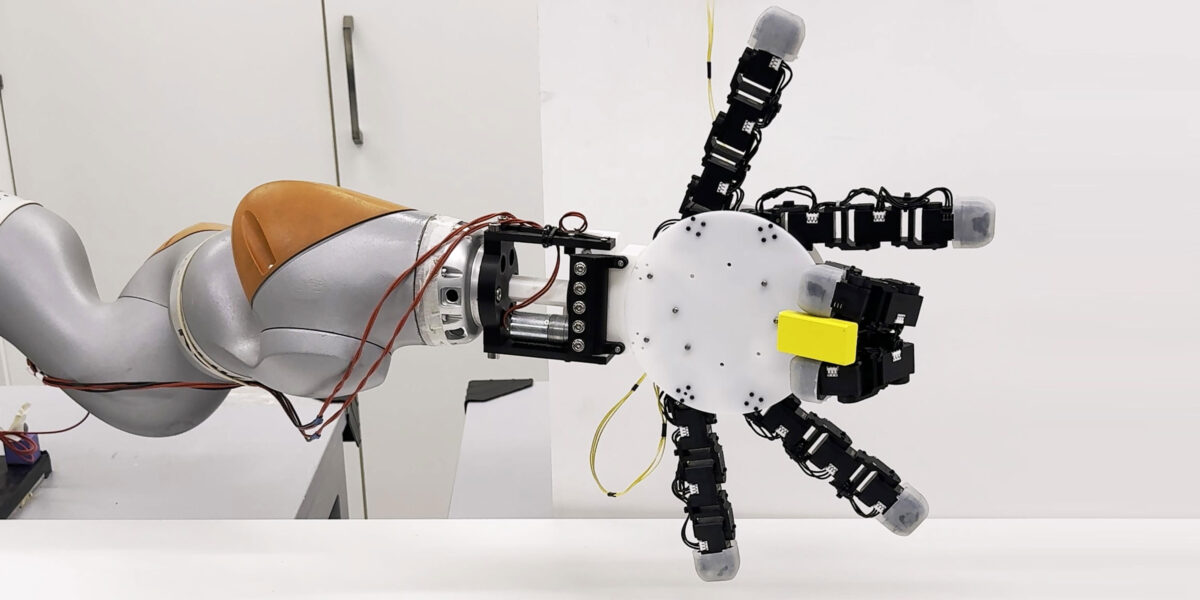
Diese Roboterhand greift, kriecht und trägt zugleich. Warum sie der menschlichen Hand technisch überlegen ist.
Foto: 2025 LASA/CREATE/EPFL, Creative Commons BY-SA 4.0 (DE)
Mit opponierbarem Daumen, vielen Gelenken und sensibler Haut gilt die menschliche Hand als Maßstab für Geschicklichkeit. Genau deshalb ahmen viele Roboterhände sie nach. Das ist nachvollziehbar – aber nicht optimal. Denn die menschliche Hand ist kein Ingenieurprodukt, sondern das Ergebnis eines langen Evolutionsprozesses mit klaren Kompromissen. Ein Forschungsteam der Ecole Polytechnique Fédérale de Lausanne (EPFL) zeigt jetzt, dass sich diese Grenzen technisch überwinden lassen.
Inhaltsverzeichnis
Die Schwächen der menschlichen Hand
Die größten Einschränkungen sind strukturell. Menschen besitzen nur einen Daumen, der zudem asymmetrisch angeordnet ist. Hinzu kommt die Kopplung an einen Arm, dessen Beweglichkeit begrenzt ist. Das führt im Alltag zu umständlichen Ausweichbewegungen – etwa wenn Gegenstände hinter Möbeln liegen oder mehrere Dinge gleichzeitig gehalten werden müssen.
„Die Grenzen der menschlichen Hand werden deutlich, wenn wir versuchen, Gegenstände unter Möbeln oder hinter Regalen zu erreichen oder mehrere Aufgaben gleichzeitig auszuführen, wie zum Beispiel eine Flasche zu halten und gleichzeitig eine Chipstüte aufzuheben“, sagt Aude Billard, Leiterin des Learning Algorithms and Systems Laboratory (LASA) an der EPFL.
Sechs Finger statt Daumen-Dogma
Gemeinsam mit Xiao Gao sowie Kai Junge und Josie Hughes entwickelte Billard eine Roboterhand, die mit klassischen Handkonzepten bricht. Das System setzt auf Symmetrie. Bis zu sechs identische Finger lassen sich frei anordnen. Jeder Finger kann funktional die Rolle eines Daumens übernehmen. Damit entfällt das anatomische Ungleichgewicht, das menschliche Hände prägt.
Ein weiterer Unterschied: Die Hand kennt kein festes „oben“ oder „unten“. Handfläche und Rückseite sind austauschbar. Die Konstruktion ist reversibel. Das erlaubt Greifbewegungen aus Richtungen, die für Menschen kaum möglich sind.
Hier wird Ihnen ein externer Inhalt von youtube.com angezeigt.
Mit der Nutzung des Inhalts stimmen Sie der Datenschutzerklärung
von youtube.com zu.
Wenn Greifen und Fortbewegung verschmelzen
Besonders ungewöhnlich ist die Fähigkeit zur Eigenbewegung. Die Roboterhand kann sich vom Arm lösen und eigenständig fortbewegen. Sie kriecht wie eine Spinne über Oberflächen, greift Objekte und transportiert sie zurück. In der Robotik spricht man von „Loco-Manipulation“, also der Kombination aus Manipulation und Fortbewegung.
„Unser Gerät führt zuverlässig und nahtlos ‚Loco-Manipulation‘ durch – stationäre Manipulation kombiniert mit autonomer Mobilität –, was unserer Meinung nach ein großes Potenzial für die Industrie-, Dienstleistungs- und Erkundungsrobotik hat“, fasst Billard zusammen.
Inspiration aus der Natur – nicht vom Menschen
Obwohl die Hand futuristisch wirkt, orientiert sie sich nicht an menschlicher Anatomie. Vorbilder finden sich eher im Tierreich. Kraken nutzen ihre Arme gleichermaßen zum Greifen und zur Fortbewegung. Insekten wie die Gottesanbeterin kombinieren Lauf- und Fangfunktionen in denselben Gliedmaßen.
Dieses Prinzip überträgt die EPFL-Hand auf die Technik. Sie kann gleichzeitig kriechen und mehrere Objekte festhalten – unter der Handfläche, auf dem „Rücken“ oder beidem. Mit fünf Fingern deckt sie die meisten klassischen Greifmuster ab. Mit sechs oder mehr Fingern übernimmt sie Aufgaben, für die Menschen beide Hände brauchen, etwa große Flaschen öffnen oder Schrauben eindrehen.


„Es gibt keine wirkliche Begrenzung hinsichtlich der Anzahl der Objekte, die es halten kann; wenn wir mehr Objekte halten müssen, fügen wir einfach weitere Finger hinzu“, sagt Billard.
Einsatz in engen und komplexen Umgebungen
Die Forschenden sehen Anwendungen dort, wo klassische Roboter an Grenzen stoßen. In beengten Industrieanlagen. In der Wartung. In der Erkundung schwer zugänglicher Räume. Die Hand könnte bestehende Roboterarme erweitern, ohne deren gesamte Kinematik neu zu entwerfen.
Auch der Einsatz als Prothese ist denkbar, obwohl das Design bewusst nicht menschenähnlich ist. Gerade das könnte ein Vorteil sein.
„Die symmetrische, reversible Funktionalität ist besonders wertvoll in Szenarien, in denen Benutzer von Fähigkeiten profitieren könnten, die über die normalen menschlichen Funktionen hinausgehen“, sagt Billard. Studien zu zusätzlichen Roboterfingern zeigen, dass sich das menschliche Gehirn überraschend gut an neue Gliedmaßen anpasst.
Ein Beitrag von:











