So werden humanoide und mobile Roboter sicher
Humanoide und mobile Roboter kommen ‒ aber bitte sicherer!

Solche Situationen bereiten Sicherheitsfachleuten in der Robotik Kopfzerbrechen. Aber die Technik kann Gefahrensituationen immer besser erfassen.
Foto: M. Ciupek
Die Robotik ist im wahrsten Sinne des Wortes in Bewegung. Neben stationären Robotern bevölkern immer mehr mobile Roboter die Fabriken und Lagerhallen. Künftig könnten noch humanoide Roboter hinzukommen. Dass erfordert auch ein Umdenken bei der Sicherheitstechnik. Denn einerseits muss auch bei mobilen Robotern die funktionale Sicherheit gewährleistet werden und andererseits dürfen Sicherheitssysteme an stationären Robotern nicht bei jeder erkannten Bewegung in einen sichern Stopp gehen. Bei Humanoiden gilt es zudem Stürze abzusichern.
Für die Überwachung von Schutzräumen an stationären Anlagen erweisen sich inzwischen Radarsysteme als probates Mittel, teilweise in Kombination mit anderen Sensoren und Kamerasystemen. Im Gegensatz zu reinen Kamerasystemen oder Laserscannern können Radarsysteme Menschen zuverlässig von mobilen Robotern unterscheiden. Da das Radarsystem nur Punktewolken detektiert, aber keine Kamerabilder erzeugt, gibt es auch keine Probleme mit personenbezogenen Informationen.
Blick in die Vorausentwicklung bei Pilz zeigt Radarsensor im Einsatz
Wie weit die Entwicklung in diesem Bereich bereits ist, zeigt ein Blick in die Vorausentwicklung beim Sicherheitstechnik-Spezialisten Pilz in Ostfildern. Dort ist ein Radarsensor etwa auf Brusthöhe an einem Ständer angebracht. Er überwacht einen Arbeitsraum, für den in der dazugehörigen Softwarelösung verschiedene Sicherheitszonen definiert wurden. Das mobile Transportsystem im Raum wird von dem System ignoriert, sofern es nicht mit einem Tracker sichtbar gemacht wird. Menschen, die sich in dem Labor bewegen, werden dagegen registriert. Eine Signalleuchte signalisiert: Grün für „keine Gefahr“, Gelb für eine verlangsamte Maschinentätigkeit und Rot für einen Stopp.
Das Besondere dabei: Der Radarsensor erfasst auch die Geschwindigkeiten und die Bewegungsrichtungen der Menschen. In der Darstellung auf dem Überwachungsmonitor werden diese in Form von Vektoren dargestellt. Je länger der Pfeil, desto höher ist die Geschwindigkeit. Dadurch kann das Sicherheitssystem nun auch erkennen, ob sich ein Mensch direkt auf die Gefahrenquelle zubewegt oder ob er den Gefahrenbereich auf seinem Weg voraussichtlich nur tangieren wird.


Smart Factory in Kaiserslautern forscht an operativer Sicherheit für Roboter
An der Smart Factory in Kaiserslautern spricht man deshalb von einer „Operational Safety Intelligence“. Pilz ist Partner der Forschungsfabrik. Zusammen mit weiteren Partnern wie dem TÜV Süd und B&R entwickelt man dort neue Sicherheitsstandards. Im Gespräch mit VDI nachrichten hatte dazu der Vorstandsvorsitzende der Smart Factory KL, Martin Ruskowski, bereits 2023 durchblicken lassen: „Operative Daten kann ich noch gut per Kabel managen. Aber sobald es um die Sicherheit von autonomen Transportsystemen und mobilen Robotern geht, brauche ich komplett neue Konzepte und Sicherheitsstandards.“
Markus Locke, Produktmanager bei Pilz, sagt: „Für die Raumüberwachung und für Distanzmessungen ist derzeit die Radartechnologie ein vielversprechender neuer Trend in der Automatisierung. Für Pilz ist die Detektion des Menschen im definierten Raum deshalb eine zukunftsweisende Technologie.“ Für das Automatisierungsunternehmen gilt das im doppelten Sinne: „Wenn Anwender sicher wissen, wo sich Menschen bzw. Maschinenbediener in Produktionsbereichen gefahrlos aufhalten können, können sie die Sicherheit – Safety sowie Security – für den Menschen gewährleisten sowie die Produktivität der Anlagen steigern“, erklärt Locke.
Neura setzt für die Robotersicherheit auf Sensorfusion
Auf Radarsysteme zur Überwachung von Robotern setzen auch die Unternehmen Neura Robotics und Synapticon. Beide haben kürzlich auf der Branchenmesse Automatica in München ihre Konzepte vorgestellt. Neura aus Metzingen nennt seine Lösung Omnisensor. Der Radar ist ein Teil des Multisensorsystems, dass aus ein bis vier Modulen aufgebaut werden kann. Mit vier Modulen hat das System einen Rundumblick (360°) und deckt von der Decke nach untern hängend einen Bereich von 180° ab. Genauso ist aber laut Hersteller auch eine Montage an einer Wand oder einem mobilen Roboter möglich.
Wird ein Mensch in der Schutzzone detektiert, zeigt das ein gelbes bzw. rotes Licht auch direkt am Sensormodul an. Über einem Roboter montiert, differenziert die Schutzeinrichtung dabei, ob sich ein Mensch in der Schutzzone befindet oder z. B. eine Getränkekiste. „Das macht den Sensor so spannend. Klassische Sensorik muss bei jeder Bewegung davon ausgehen, dass da potenziell ein Mensch sein kann und anhalten“, sagt Arne Nordmann, Entwicklungsleiter bei Neura Robotics. Unnötige Maschinenstillstände würden damit vermieden. Gleichzeitig könnten Flächen besser ausgenutzt werden, weil auf Schutzzäune verzichtet werden kann. „Der Sensor sieht aber auch andere Objekte und kann diese Information weitergeben. Das ist nicht vordergründig für die Sicherheit relevant, kann aber in der Applikation nützlich sein“, erklärt er.

Ringe auf dem Boden zeigen auf der Messe Automatica die Schutzzonen um einen Roboter an. Er wird von einem System mit mehreren Sensoren überwacht, das unter der Decke hängt. Werden Menschen in dem Bereich erkannt, reagiert der Roboter und verlangsamt seine Geschwindigkeit bis zum Stillstand.
Foto: M. Ciupek
Der Hersteller spricht von einer Sensorfusion, bei der neben den Radarelementen der jeweiligen Module auch Daten anderer Erkennungsmethoden ausgewertet werden. Auf Nachfrage erklärt Nordmann: „Um das höchstmögliche Sicherheitslevel – konkret Performance Level e bzw. PL e – zu erreichen, setzen wir auf eine Kombination verschiedener Sensortechnologien. Die sichere Klassifikation von Menschen und Objekten erfolgt dabei redundant und divers, also mit mindestens zwei unterschiedlichen Sensorprinzipien. Diese Diversität ist essenziell, um systematische Unzulänglichkeiten einzelner Technologien abzufangen.“
Als Beispiel nennt er ein klassisches Kamerasystem. Auch ein redundantes Kamerasystem könnte in dunklen oder nebligen Umgebungen an Grenzen stoßen. Durch die Kombination mit anderen Sensortechnologien wäre auch unter solchen Bedingungen eine sichere Erkennung möglich.
Bis zu vier Sensormodule schaltet Neura beim Omnisensor zusammen
Zum modularen Aufbau des berührungslosen Sensorsystems erklärt er: „Ein einzelnes Modul reicht aus, um einen definierten, begrenzten Bereich sicher zu erfassen.“ Für einen 360°-Rundumblick hingegen werden aktuell vier Module miteinander kombiniert. Technisch lassen sich die Module demnach flexibel verschalten, um unterschiedliche Raumgeometrien bzw. Sicherheitszonen abzudecken.
Das war auch auf Messe in München der Fall. „Auf unserem Stand bei der Automatica haben wir Omnisensoren in der Konfiguration mit vier Modulen eingesetzt, um nahezu den gesamten Messestand im Rundumblick zu überblicken“, sagt Nordmann. In dieser Konfiguration kostet der Sensor laut Neura etwa 10.000 €. Bei dem Messeauftritt habe das Unternehmen demonstriert, wie lückenlos der Sensorbereich im Blick behalten wird, ohne die Privatsphäre anzutasten. Da das System nicht auf Kameras basiert werde keine personenbezogene Identifikation ermöglicht.
Für seine neueste Generation humanoider Roboter hat Neura zudem eine Sensorhaut vorgestellt. Im Gegensatz zur menschlichen Haut kann sie Annäherungen im Nahbereich aber schon vor dem physischen Kontakt erkennen. Der Hersteller nennt sie „Artificial Skin“.
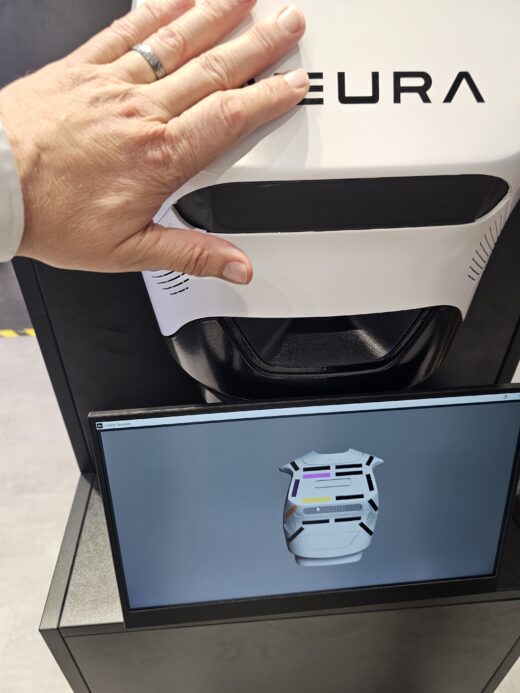
Für seinen humanoiden Roboter hat Neura eine Sensorhaut vorgestellt, die eine Annäherung berührungslos detektiert.
Foto: M. Ciupek
Hier stößt die Sicherheitstechnik von Industrierobotern an Grenzen
Der Antriebstechnikspezialist Synapticon aus Schönaich adressiert die wachsenden Sicherheitsanforderungen kollaborativer, mobiler und humanoider Roboter – insbesondere dann, wenn künstliche Intelligenz zum Einsatz kommt. Seine Sicherheitsplattform Positron ist in drei ineinandergreifende Ebenen gegliedert. Die erste Ebene, Safe Motion, überwacht mehr als 50 Freiheitsgrade. Das passiert allein mit den in Synapticons Somanet-Antrieben integrierten, sicherheitszertifizierten Positionssensoren. Spezielle Perzeptionssensoren sind hierfür nicht notwendig, sodass Bewegungen bis hin zum kontrollierten Abfangen eines Sturzes direkt auf Aktuator- und Gelenkebene abgesichert werden können.
Die zweite Ebene, Safe Human Detection, erkennt Personen anhand der RGB- oder RGB-D-Kameras (Tiefenkameras), die der Roboterhersteller ohnehin verbaut. Für höhere Performance Levels lässt sich optional eine weitere, redundante Sensorkategorie wie Radar oder Lidar integrieren, sofern deren Zuverlässigkeit nachgewiesen ist.
Die dritte Ebene, Safety AI, verbindet beide Vorstufen: Sie generiert in Echtzeit die Überwachungsparameter für Safe Motion bei vollständig KI-gesteuerten Robotern und analysiert gleichzeitig dieselben Kameradaten semantisch, um potenziell gefährliche Aktionen des Roboters frühzeitig zu identifizieren und einzuschränken.
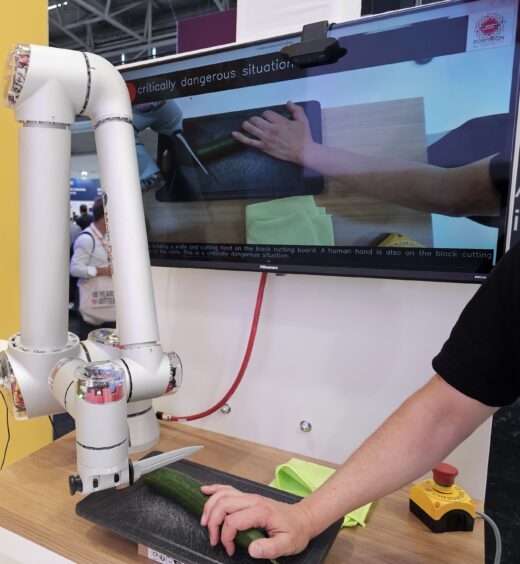
Mit einer Stereokamera ist die Sicherheitssteuerung des kollaborierenden Roboters in der Lage, den menschlichen Eingriff als „gefährliche Situation“ zu erkennen. Das Messer ist beim Demonstrator stumpf.
Foto: M. Ciupek
Sicherheitssystem von Synapticon erkennt Menschen und interpretiert ihre Absicht
Wie das in der Praxis aussieht, demonstriert Synapticon unter anderem mit einem kollaborierenden Roboter, der eine Gurke schneidet. Sobald eine Stereokamera erkennt, dass sich eine menschliche Hand nähert, klassifiziert Safety AI den Kontext „Messer in Bewegung“ als riskant. Das Safe-Human Detection-Modul meldet die Gefahr. Daraufhin reduziert die Komponente Safe Motion die Geschwindigkeit beziehungsweise stoppt die Bewegung.
Ein weiteres Beispiel zeigt einen virtuellen humanoiden Roboter auf einem Großbildschirm: Betritt eine Person seinen Arbeitsbereich, verlangsamt der Roboter zunächst sein Tempo und bleibt schließlich stehen. Dagegen wird ein Stuhl im selben Bereich als unbeachtlich erkannt.

Nikolai Ensslen, Geschäftsführer von Synapticon, verdeutlicht die Menscherkennung. Während der Stuhl den virtuellen Roboter nicht beeindruckt, springt die Sicherheitsregelung beim Menschen in den gelben Modus und reduziert die Robotergeschwindigkeit.
Foto: M. Ciupek
Was passiert, wenn der humanoide Roboter fällt?
Besondere Aufmerksamkeit gilt dem Szenario eines Sturzes. Fällt ein rund 1,8 Meter großer und 80 Kilogramm schwerer Humanoid etwa nach einem Stromausfall, kann ein herkömmlicher Not-Aus die daraus entstehenden Gefahren, etwa für Kinder, nicht hinreichend mindern. Synapticon stattet deshalb jede Antriebseinheit mit einem kleinen Pufferakku aus. Zusammen mit der beim Bremsen zurückgewonnenen Energie und den zuletzt bekannten Umgebungsdaten steht dem System genug Leistung zur Verfügung, um den Roboter kontrolliert abrollen zu lassen und die Risiken signifikant zu reduzieren.
Hinweis: Gegenüber der ursprünglichen Fassung dieses Beitrags, wurden die Aussagen zu den Lösungen von Neura und Synapticon nachträglich präzisiert.
Ein Beitrag von:













