Novum auf der ISS: Roboter arbeiten systemübergreifend zusammen
Ein japanischer und ein deutscher Roboter spielen auf der ISS „Ich sehe was, was du nicht siehst“. Was sich einfach anhört, ist doch einigermaßen komplex.
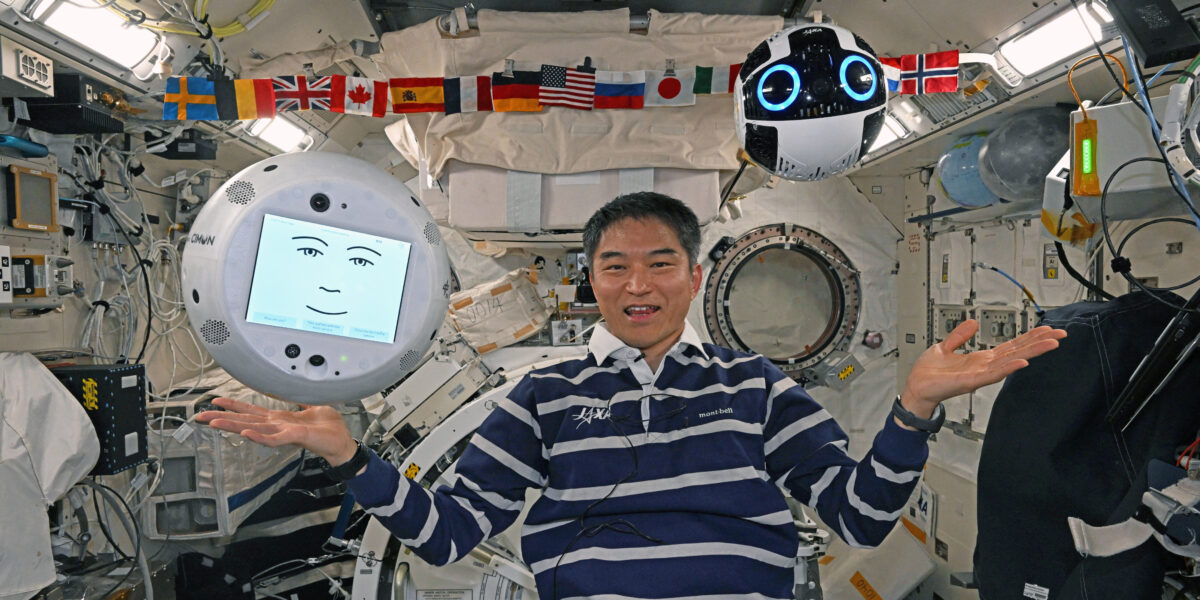
Die beiden Roboter CIMON der Deutschen Raumfahrtagentur im DLR und Int-Ball2 der japanischen Raumfahrtagentur JAXA an Bord der ISS haben im Experiment ICHIBAN erstmals miteinander kommuniziert.
Foto: DLR/ESA/JAXA/NASA
Auf den ersten Blick wirkt es fast spielerisch: Zwei Roboter identifizieren versteckte Objekte in unterschiedlichen Modulen der Internationalen Raumstation (ISS) und tauschen Informationen aus. Doch hinter dem vermeintlichen Spiel steckt ein komplexes Kommunikations- und Steuerungsexperiment.
Die Beteiligten: CIMON, ein interaktiver Assistent der Deutschen Raumfahrtagentur im DLR, und Int-Ball2, eine fliegende Kameraeinheit der japanischen Raumfahrtagentur JAXA. Zum ersten Mal kommunizierten die beiden Systeme im Rahmen des Experiments ICHIBAN – obwohl sie ursprünglich gar nicht dafür ausgelegt waren.
Inhaltsverzeichnis
Darum geht es im Experiment
Der Name des Experiments ist bewusst gewählt: Ichiban bedeutet auf Japanisch „die Nummer Eins“. Es handelt sich um den ersten erfolgreichen Versuch, zwei unabhängig entwickelte Robotersysteme auf der ISS zu einer gemeinsamen Aufgabe zu koordinieren.
Ziel war es, Objekte im japanischen Kibo-Modul zu lokalisieren und fotografisch zu dokumentieren – etwa einen Zauberwürfel, Werkzeuge und den älteren Roboter Int-Ball1. Der besondere Clou: Die Steuerung von Int-Ball2 erfolgte über Sprachbefehle an CIMON. Das Kamerabild wurde dabei in Echtzeit auf CIMONs Display übertragen – ein bisher nicht möglicher Datentransfer über verschiedene Systemgrenzen hinweg.
Technische Premiere in der Raumstation
Das Besondere an ICHIBAN: CIMON und Int-Ball2 sind eigentlich nicht kompatibel. Die Systeme wurden unabhängig voneinander für völlig verschiedene Aufgaben entwickelt. Noch gravierender: Sie sind über unterschiedliche Netzwerke der ISS angebunden – normalerweise ein unüberwindbares Hindernis für die Datenübertragung. Doch für das Experiment arbeiteten deutsche und japanische Ingenieur*innen eng zusammen. Gemeinsam entwickelten sie neue Protokolle und Sicherheitsstandards, um die Kommunikation überhaupt zu ermöglichen.
„Die ICHIBAN-Demonstration auf der ISS in Kooperation mit unseren Kolleginnen und Kollegen bei der JAXA stellt einen bedeutenden Meilenstein in der Weltraumrobotik dar“, sagt Dr. Christian Rogon, Projektleiter auf deutscher Seite. „Diese Leistung wird die Unterstützung für Astronautinnen und Astronauten maßgeblich verbessern.“
Sprachsteuerung über Modulgrenzen hinweg
Durchgeführt wurde das Experiment im europäischen Columbus-Modul der ISS. Dort sprach Astronaut Takuya Ōnishi mit CIMON und gab über Sprachbefehle Anweisungen an Int-Ball2. Die fliegende Kameraeinheit befand sich gleichzeitig im japanischen Kibo-Modul. Gesteuert wurde Int-Ball2 indirekt – durch eine Kette von Weiterleitungen zwischen den beiden Robotern.
Die Aufgabe war klar definiert: Im Kibo-Modul wurden mehrere Objekte versteckt, darunter ein Zauberwürfel, ein Schraubenzieher und der Vorgänger von Int-Ball2. Ziel war es, diese Objekte mithilfe der Kamera zu lokalisieren und zu dokumentieren. Das Besondere: Das Kamerabild wurde live an CIMON übertragen, der über ein Display verfügt. Dieses Bild war sonst nur auf der Erde zu sehen – ein weiteres Novum für die Raumstation.
CIMON: Der sprechende Begleiter im All
CIMON – kurz für Crew Interactive Mobile Companion – ist seit 2018 auf der ISS im Einsatz. Entwickelt wurde der kugelförmige Assistenzroboter von Airbus im Auftrag der Deutschen Raumfahrtagentur im DLR. Als Herzstück des Systems fungiert eine Künstliche Intelligenz aus dem Hause IBM. Die Software ermöglicht es CIMON, mit der Besatzung zu sprechen, Aufgaben zu erklären und bei Experimenten zu assistieren.
„CIMON kann sehen, hören, verstehen und sprechen“, so beschreiben die Entwickler den Roboter. Die KI reagiert auf Spracheingaben, führt durch Experimente und dokumentiert mit Kameras die Arbeit der Astronautinnen und Astronauten. Auch Unterhaltung ist möglich – CIMON spielt auf Wunsch Musik oder führt ein Gespräch.
Die technische Entwicklung ist das Ergebnis einer internationalen Zusammenarbeit. Neben Airbus waren unter anderem das Klinikum der Ludwig-Maximilians-Universität München, die ESA sowie das Columbus-Kontrollzentrum in Oberpfaffenhofen beteiligt.

Int-Ball2: Die fliegenden Augen der JAXA
Ganz anders ist Int-Ball2 aufgebaut. Die japanische Raumfahrtagentur JAXA entwickelte die kugelförmige Kameraeinheit, um Aufgaben der Astronautinnen und Astronauten zu übernehmen. Rund 10 % ihrer Zeit verbringen Crewmitglieder normalerweise mit dem Fotografieren von Versuchsaufbauten. Int-Ball2 übernimmt diesen Job autonom – und spart so Ressourcen.
Seit 2024 ist Int-Ball2 auf der ISS im Einsatz, stationiert im Kibo-Modul. Die Kamera kann ferngesteuert werden, liefert Bildmaterial in Echtzeit und dokumentiert Experimente aus verschiedenen Blickwinkeln. Entwickelt wurde die Steuerungssoftware von der japanischen Firma SEC.
Ein Beitrag von: