Dieser Roboter ist ein anpassungsfähiger Erntehelfer
Japanische Forschende haben einen neuartigen weichen Robotergreifer entwickelt, der sich durch einen besonderen Falten-Mechanismus auszeichnet. Das heißt, er kann auch dort eingesetzt werden, wo bislang immer noch von Hand geerntet werden musste.
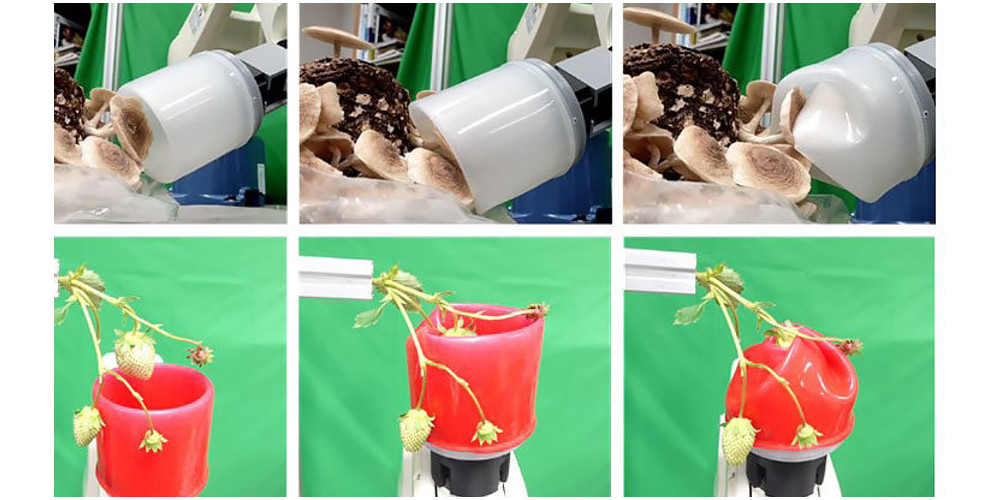
ROSE bei der Arbeit.
Foto: Van Anh Ho from JAIST
In zahlreichen Industriezweigen, darunter Fertigung, Verpackung und Logistik, haben sich Robotergreifer als unverzichtbare Werkzeuge etabliert, insbesondere für sogenannte Pick-and-Place-Aufgaben. Mittlerweile erstreckt sich die Nachfrage nach diesen speziellen Robotern auch auf die Landwirtschaft beziehungsweise den Agrarsektor, wo sie bei der Ernte helfen oder Ware verpacken.
Allerdings stoßen konventionelle Robotergreifer bei vielen Pflanzen an ihre Grenzen. Denn gerade das Ernten lässt sich nicht immer strukturieren, weil Pflanzen individuell aussehen und unterschiedlich wachsen. Entsprechend groß ist der Bedarf an flexibleren Robotern, die sich an Gegenstände mit unterschiedlicher Gestalt, Größe und Textur anpassen können. Robotergreifer aus weichen Materialien könnten dafür eine Lösung sein.
Japanische Lösung für den Robotergreifer
Die aktuellen Verfahren zur Anpassung dieser weichen Greifer an komplexe Formen basieren jedoch auf einer aufwändigen Steuerung und Planung, die wiederum auf datenbasierten Modellen aufbaut. Diese Modelle erfordern eine beträchtliche Datenmenge, was die Anwendungsmöglichkeiten einschränkt. Darüber hinaus ist es nicht leicht, ein sensorischen System in den flexiblen Körper der Greifer zu integrieren. Das benötigte Design ist kompliziert, weswegen die Fertigungsmethoden komplex und teuer sind.
Ein Forschungsteam des Japan Advanced Institute of Science and Technology (JAIST) stellt dafür jetzt eine potenzielle Lösung vor: einen weichen Robotergreifer mit der Bezeichnung ROtation-based Squeezing grippEr oder kurz ROSE.



ROSE: Vom Blühzustand einer Rose inspirierter Robotergreifer
ROSE bietet einen einfacheren Ansatz für die Ernte in der Landwirtschaft, indem er Objekte durch ein „Falten“-System sanft ergreift. Im Gegensatz zu herkömmlichen Greifern werden für ROSE daher keine komplexen Steuerungs- und Planungsstrategien benötigt, damit sich der Roboter an verschiedene landwirtschaftliche Produkte anpassen kann.
Das Prinzip funktioniert folgendermaßen: Der Aufbau von ROSE besteht aus einer isolierten schalenförmigen Kammer, die sich aus zwei dünnen, weichen Elastomerschichten zusammensetzt, wobei die innere und die äußere Schicht voneinander getrennt sind. Wird ausschließlich die innere Schicht mithilfe eines externen Motors gedreht, verformen sich die Schichten. Diese Rotationsbewegung der inneren Schicht führt zu einer Dehnungsdiskrepanz zwischen der äußeren und der inneren Schicht. Dadurch entsteht eine Serie von Einwärtsfalten. Dieser einzigartige Mechanismus verkleinert den zentralen Raum in ROSE. So kann er zupacken, beziehungsweise ein Objekt greifen, und das besonders sanft.
Simulationsmodell optimiert Greifleistung des Robotergreifers
Zur Verfeinerung dieses Mechanismus untersuchten die Forschenden den Faltenbildungsprozess mithilfe eines Simulationsmodells, das auf der Finite-Elemente-Methode basiert (zur Materialmodellierung) . Die Simulationen offenbarten einen Zusammenhang zwischen verschiedenen geometrischen Merkmalen, darunter Dicke, Durchmesser und Höhe. Insbesondere zeigte sich, dass die Verteilung der Hautdicke von ROSE, also der Abstand zwischen den Schichten, einen erheblichen Einfluss auf die Greifleistung hat.
Zudem wurde durch die Simulationen klar, dass auch das Verhältnis von Durchmesser und Höhe des Greifers entscheidend ist. Die Simulationsergebnisse wurden durch diverse Experimente bestätigt.
Robotergreifer bewährt sich in der Praxis
In einem Feldversuch im wahrsten Sinne des Wortes setzten die Forschenden ROSE in der Landwirtschaft ein, indem sie den Robotergreifer Erdbeeren und Pilzen ernten ließen. ROSE erzielte in mehreren Versuchen hohe Erfolgsquoten, unabhängig davon, ob sie steif oder weich waren. Es gelang ihm auch, einen Pilz aufzunehmen, ohne ein Stück abzubrechen, sofern die Größe des Pilzes in den Greifbereich passte.
Damit könnte ROSE ein Lösungsansatz sein, um den wachsenden Arbeitskräftemangel in der Landwirtschaft auszugleichen.
Ein Beitrag von:













