Humanoider Roboter hebt ab – mit Düsenkraft und KI
Erstmals hebt ein humanoider Roboter dank KI und Jettriebwerken ab – Forschende in Italien ermöglichen kontrolliertes Schweben.
Humanoider Roboter iRonCub3 hebt erstmals mit Jetantrieb ab – gesteuert durch KI und optimiert für extreme Einsätze.
Foto: Istituto Italiano di Tecnologia (IIT)
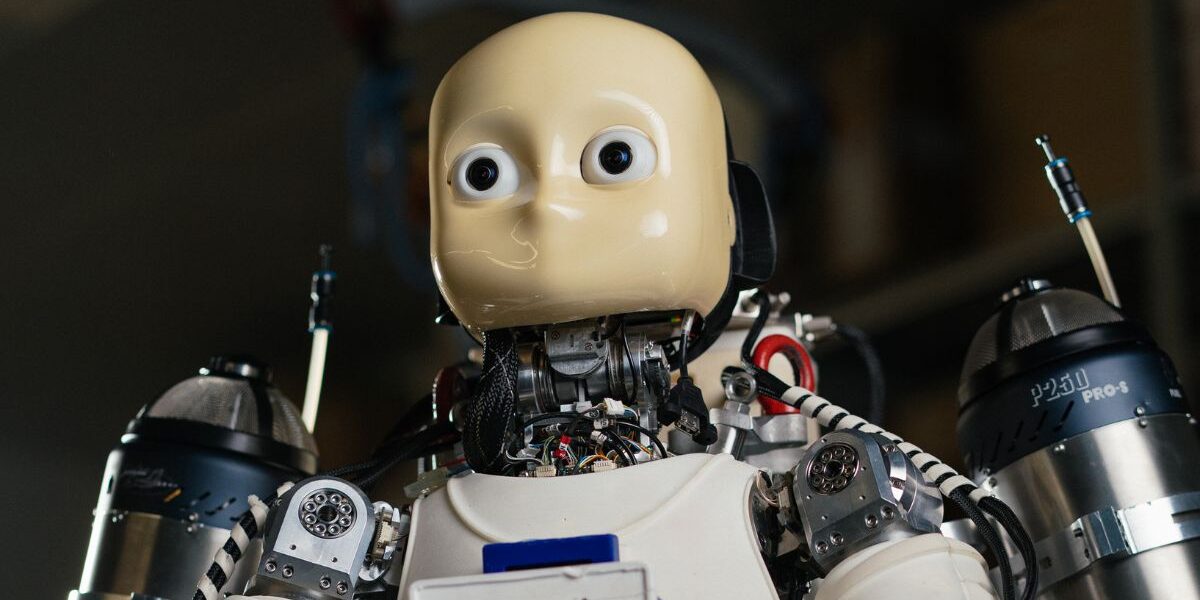
Der humanoide Roboter iRonCub3 schwebt erstmals kontrolliert in die Luft – und das nicht mit Propellern oder Rotoren, sondern mit vier echten Düsentriebwerken. Zwei davon sitzen an den Unterarmen, zwei weitere auf dem Rücken des Roboters. Sie erzeugen gemeinsam über 1000 Newton Schubkraft. Aus den Triebwerken strömt Abgas mit Temperaturen von bis zu 800 °C. Um den Roboter vor dieser Hitze zu schützen, entwickelten die Forschenden eine spezielle Titan-Wirbelsäule sowie hitzebeständige Verkleidungen.
Der rund 70 Kilogramm schwere iRonCub3 ist ein technologisches Upgrade des Roboters iCub. Während iCub ursprünglich für die Forschung an menschlicher Bewegung konzipiert wurde, erweitert iRonCub3 dessen Fähigkeiten in die dritte Dimension – den Luftraum.
Inhaltsverzeichnis
Menschliche Form – aber schwer kontrollierbar
Humanoide Roboter sind für das Fliegen denkbar schlecht geeignet. Ihre Gliedmaßen und der längliche Körper erzeugen unregelmäßige Luftströme, und der Schwerpunkt verschiebt sich ständig. Anders als symmetrische Drohnen muss iRonCub3 mit asymmetrischer Aerodynamik zurechtkommen.
Das Team des Italienischen Instituts für Technologie (IIT) arbeitete deshalb mit Windkanaltests, Simulationen und maschinellem Lernen. Dabei zeigte sich: Nicht der Luftstrom, sondern die Position der Arme und Beine beeinflusst die Flugstabilität am stärksten.
Die Ingenieurinnen und Ingenieure testeten etwa 50 verschiedene Fluglagen im Windkanal. Das Ziel: ein präzises Verständnis der Kräfte, die auf den Roboter einwirken – abhängig von Haltung und Fluglage.
KI lernt fliegen – im Windkanal und per Simulation
Um die komplexen Wechselwirkungen zwischen Körperhaltung und Luftkräften zu erfassen, entwickelten die Forschenden zwei KI-Modelle:
- Ein neuronales Netz berechnet Kräfte auf einzelne Körperteile.
- Ein vereinfachtes mathematisches Modell beschreibt den Luftwiderstand näherungsweise.
Beide Modelle flossen in die Flugsteuerung ein. So kann iRonCub3 nicht nur schweben, sondern sich auch aktiv gegen Seitenwind stabilisieren oder bei wechselnden Fluglagen reagieren. Antonello Paolino, Erstautor der Studie, erklärt: „Unsere Modelle umfassen neuronale Netze, die mit simulierten und experimentellen Daten trainiert wurden und in die Steuerungsarchitektur des Roboters integriert sind, um einen stabilen Flug zu gewährleisten.“
iRonCub3: Technische Eckdaten des fliegenden humanoiden Roboters
- Entwickelt von: Istituto Italiano di Tecnologia (IIT), Genua
- Gewicht: ca. 70 kg
- Antrieb: 4 JetCat-Turbinen (2 am Rücken, 2 an den Armen)
- Maximaler Schub: über 1000 Newton
- Abgastemperatur: bis zu 800 °C
- Materialstruktur: Titan-Wirbelsäule, hitzebeständige Verkleidung
- Flughöhe bisher: ca. 50 cm (Indoor-Test)
- Steuerung: KI-gestützt mit neuronalen Netzen
- Besonderheiten: Echtzeit-Aerodynamik, Windkanal-Optimierung
- Geplante Anwendungen: Such- und Rettungsmissionen, Extremumgebungen
Steuerung: Jetkraft trifft Gelenkwinkel
Die Jetdüsen allein reichen nicht aus, um einen humanoiden Roboter stabil in der Luft zu halten. Entscheidend ist das Zusammenspiel aus Triebwerksleistung, Gelenkbewegung und KI-basierter Steuerung. iRonCub3 kann mit seiner Flugsteuerung auch schwierige Übergänge meistern – etwa beim sequentiellen Zünden der Turbinen oder bei schnellen Lageveränderungen.
Ein Co-Design-Ansatz half dabei, Struktur, Antrieb und Steuerung gleichzeitig zu entwickeln. Die Position der Triebwerke wurde so gewählt, dass der Flug möglichst stabil und steuerbar bleibt. Auch das Wärmemanagement spielte eine zentrale Rolle, da die heißen Abgase die mechanische Integrität gefährden könnten.

Zwischen Labor und Realität
Erste Flugversuche fanden im Innenraum des IIT statt. Dabei hob iRonCub3 rund 50 Zentimeter vom Boden ab und konnte seine Position stabil halten. Die nächsten Tests sollen auf einem abgesicherten Flugfeld in Genua folgen. Dafür arbeitet das Forschungsteam mit dem örtlichen Flughafen zusammen.
Noch fehlt es an Sensorik für den Außeneinsatz. Der heiße Abgasstrom ist ebenfalls ein Sicherheitsrisiko. Deshalb beschränken sich die bisherigen Versuche auf Indoor-Tests und Simulationen. Windkanäle und virtuelle Umgebungen simulieren dabei reale Wetterbedingungen.
Rettungseinsätze als Ziel
Langfristig soll der Jet-Roboter dort helfen, wo herkömmliche Technik an ihre Grenzen stößt: in gefährlichen Industrieanlagen, bei Bränden, nach Erdbeben oder in kontaminierten Zonen. Der Vorteil liegt in der Kombination aus Flug- und Manipulationsfähigkeit – ein Roboter, der nicht nur fliegen, sondern auch greifen, tragen und analysieren kann.
Daniele Pucci, Leiter des Labors für Künstliche und Mechanische Intelligenz am IIT, betont: „Diese Forschung unterscheidet sich grundlegend von der traditionellen humanoiden Robotik und hat uns gezwungen, einen erheblichen Sprung nach vorne gegenüber dem Stand der Technik zu machen.“
Die Forschungsergebnisse wurden in Nature Communications Engineering veröffentlicht.
Ein Beitrag von:










