Kakerlaken-Roboter sollen als Lebensretter in jede Ritze vordringen
Wer es schon einmal mit Kakerlaken zu tun hatte, weiß: Die Viecher kommen einfach durch alle Ritzen. Genau das wollten sich Forscher der kalifornischen Universität Berkeley zunutze machen. Sie haben einen Roboter entwickelt, der dem Krabbeltier ähnelt und Menschen das Leben retten soll.

Kakerlaken können sich besonders flach machen und zum Beispiel auf den Schienbeinen weiterkrabbeln. Nach diesem Vorbild haben US-Ingenieure nun einen Miniroboter konstruiert, der zu Verschütteten vordringen soll.
Foto: Tom Libby, Kaushik Jayaram & Pauline Jennings/PolyPEDAL Lab UC Berkeley
„Insekten sind die erfolgreichsten Tiere unsere Erde“, sagt Robert Full, Professor der Systembiologie an der Universität Berkeley. „Denn sie dringen nahezu überall ein – wir sollten sie als Inspiration betrachten.“
Das Ergebnis dieser Inspiration heißt CRAM, ein handflächengroßer Krabbelroboter, der einige Eigenschaften echter Kakerlaken in sich trägt. Bislang gibt es nur einen Prototypen. Doch CRAM, so die Idee, könnte bei der Suche Verschütteter bereits dann loslegen, wenn Suchhunden oder Menschen das noch längst nicht möglich ist.
Kakerlaken halten das 900-fache des eigenen Gewichts aus
Robert Full: „Im Fall von Erdbeben müssen die Helfer zu allererst wissen, ob ein Schuttberg stabil und einigermaßen sicher ist. Selbst die meisten Roboter können in solches Geröll nicht eindringen.“
Kakerlaken aber schon. Ein Grund dafür liegt in ihren anatomischen Fähigkeiten: Die Insekten können ihre Beinstellung bei Bedarf komplett anders ausrichten – nämlich zur Seite. Außerdem sind die Tiere äußerst druckbeständig. „Sie können das 900-fache ihres eigenen Gewichts auf ihrem Körper überstehen“, erklärt Studienleiter Kaushik Jayaram, der den Schabenroboter entwickelt hat.

Kakerlaken können ihre Beine sogar zur Seite ausrichten, um durch besonders enge Öffnungen hindurch zu kommen. Auch das kann der Roboter der Berkeley-Universität.
Quelle: Tom Libby, Kaushik Jayaram & Pauline Jennings/PolyPEDAL Lab UC Berkeley
Und auch die künstliche Kakerlake kann ihre Beine zu den Seiten hin ausrichten und hält äußerst starken Quetschungen stand – dank eines sehr robusten Kunststoffpanzers. Durch diese Fähigkeiten ist CRAM auch dann noch in der Lage zu krabbeln, wenn er auf die Hälfte seiner eigentlichen Höhe gedrückt wird.
Kakerlaken können auch auf den Schienbeinen weiterkrabbeln
Ist ein potenzieller Durchgang einmal besonders flach, bewegen sich echte Kakerlaken anstatt auf ihren Füßen auf den Schienbeinen fort. Auch das Roboterinsekt aus Berkeley verfügt über Beine, deren Füße bei Bedarf zurückgeklappt werden können. CRAM wird also quasi tiefer gelegt.
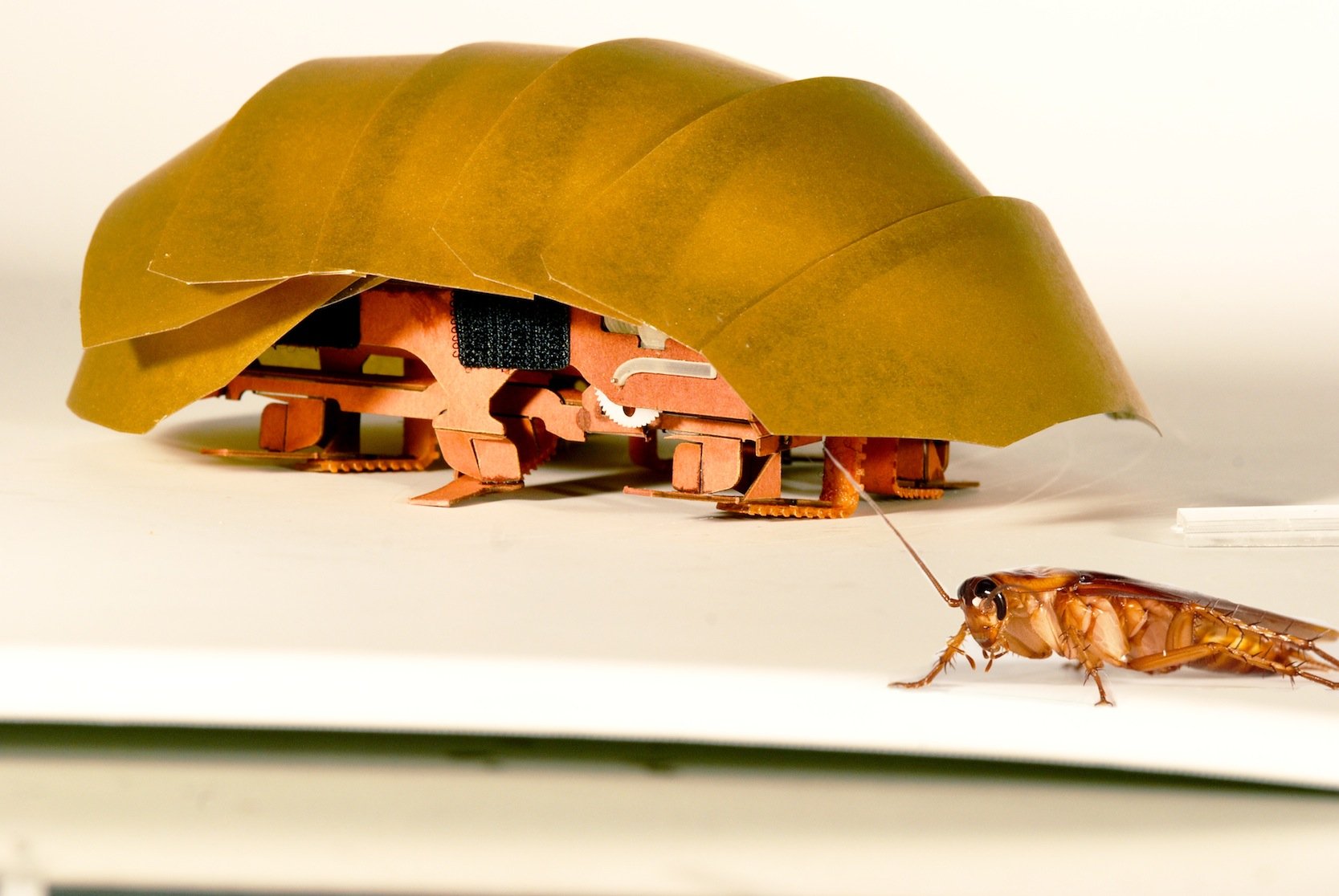
Der handflächengroße Miniroboter CRAM ist nach dem Vorbild von Kakerlaken gebaut und soll künftig Verschüttete erreichen. Dabei könnten Sie auch klären, ob beispielsweise Schuttberge stabil genug sind, damit auch Helfer vordringen können.
Quelle: Tom Libby, Kaushik Jayaram & Pauline Jennings/PolyPEDAL Lab UC Berkeley
Kaushik Jayaram und Robert Full, die Köpfe hinter CRAM, haben Amerikanische Großschaben durch exakt vermessene Gänge laufen lassen. Darin mussten die Tiere durch Ritzen kriechen, die 6,1 mm oder auch nur 3,2 mm hoch waren. Bei letzterem Spalt reduzierten die Tiere ihre ursprüngliche Höhe von gut 12 mm auf ein Viertel.

Versuche mit lebenden Kakerlaken
Auch die Robotervariante der Krabbeltiere beherrscht dank seines ausgetüftelten Exoskeletts dieses Kunststück. Der eigentlich 75 mm hohe CRAM kann auch mit 35 mm Körperhöhe noch nahezu uneingeschränkt weiterlaufen. Deshalb auch sein Name. CRAM steht für „compressible robot with articulatetd mechanisms“. Auch wenn das umständlich klingt: Krabbeln kann CRAM richtig gut.
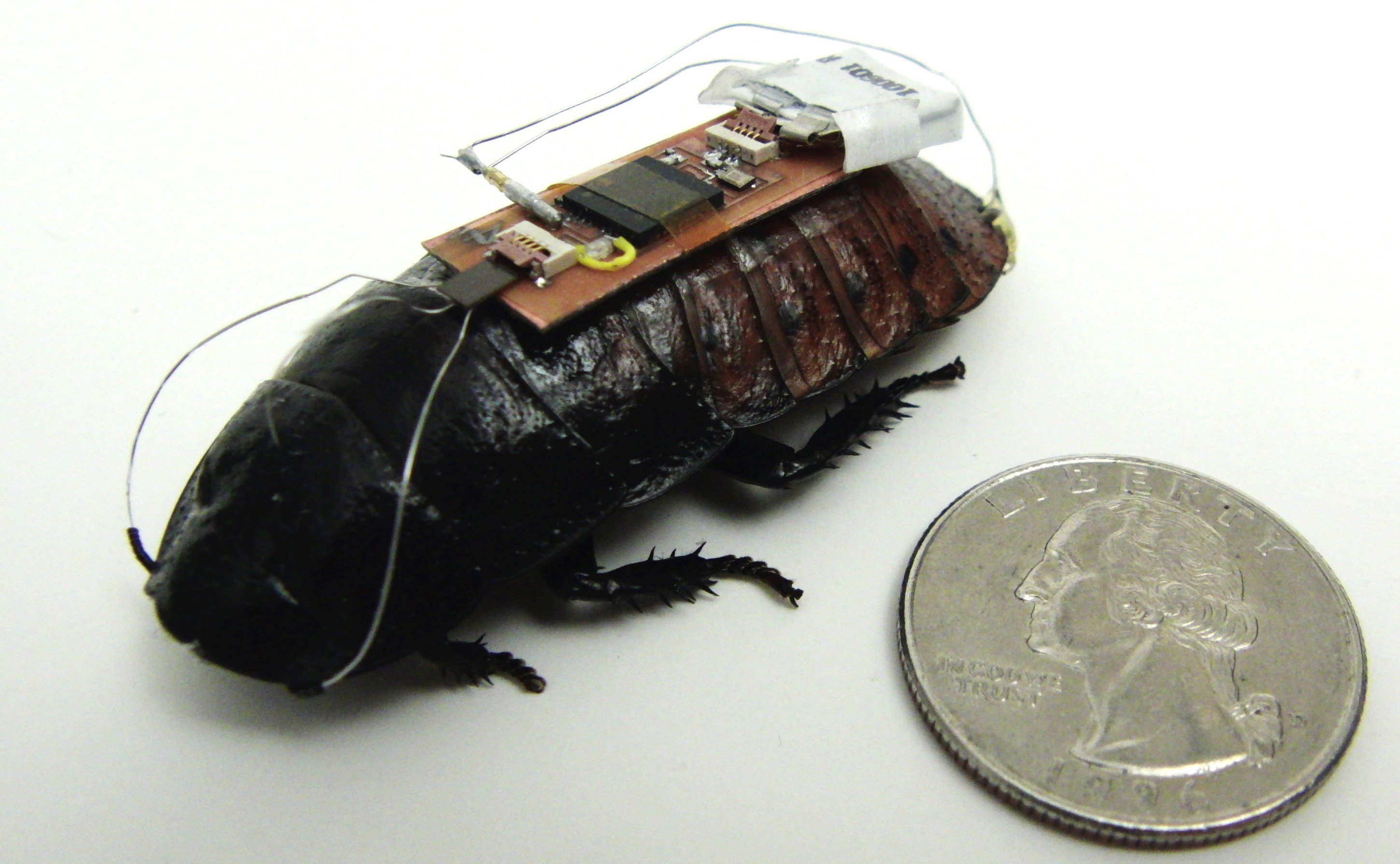
Forscher der North Carolina State University haben eine Technik entwickelt, um Küchenschaben fernzusteuern. Auf den Rücken klebt ein 0,7 Gramm leichter Chip, der mit dem Körper und den Fühler verbunden wird. Zur Steuerung des Tieres nutzen die Forscher die Gesten- und Bewegungssteuerung Kinect von Microsoft. Die Tiere könnten so eingesetzt werden, um Verschüttete zu orten.
Quelle: North Carolina State University
Die Forscher aus Berkeley sind nicht die ersten, die von den Fähigkeiten der Kakerlaken fasziniert sind. Kollegen der North Carolina State University haben eine Fernsteuerung entwickelt, die echten Kakerlaken auf den Rücken geklebt wird. So wollen sie die Tiere nutzen, um Verschüttete aufzuspüren. Und einen Laufroboter, der wie eine Kakerlake einen Rückenpanzer trägt und sich zur Seite drehen kann, um durch schmale Spalte zu kriechen, haben ebenfalls Ingenieure aus Berkeley entwickelt. Man sieht: Der Entwicklung von Robotern würde ohne Kakerlaken eine wichtige Inspiration fehlen.
Ein Beitrag von:














