Untersuchung der Geräuschemission von Drohnen
Zusammenfassung Drohnen werden für vielfältige Zwecke eingesetzt. Die stetig zunehmende Zahl von Drohnen wirft die Frage nach den Geräuschauswirkungen dieser Fluggeräte auf. Hierüber liegen derzeit weder national noch international fundierte Erkenntnisse vor. Das Umweltbundesamt hat daher mit akustischen Untersuchungen von Drohnen begonnen. Es wurden unterschiedliche Flugmanöver verschiedener Drohnenmodelle akustisch vermessen sowie die horizontale und vertikale Richtcharakteristik ermittelt. Darüber hinaus wurden binaurale Messungen durchgeführt, die psychoakustische Erkenntnisse liefern sollen.

Bild 1 Messaufbau zur Bestimmung der vertikalen und horizon‧talen Richtcharakteristik.
Foto: UBA
Drohnen sind unbemannte Flugobjekte (unmanned aircraft vehicle, UAV bzw. unmanned aircraft systems, UAS). Sie fliegen autonom, automatisiert oder können von Personen gesteuert werden. Die Nutzung von Drohnen ist vielfältig und liegt vor allem im Bereich von Foto- und Videoaufnahmen, Kartografie und Vermessung. Weiterhin werden Drohnen bei der Planung und Durchführung von Bauvorhaben sowie für die Wartung und Überprüfung der Infrastruktur eingesetzt. In Deutschland bieten inzwischen zahlreiche gewerbliche Anwenderinnen und Anwender von Drohnen ihre professionellen Dienstleitungen auf dem Markt an. Dabei haben die Anwendungsmöglichkeiten ein großes Wachstumspotenzial, da immer längere Flugzeiten und größere Traglasten realisierbar werden. Die Anwendungsbereiche mit den größten Zuwächsen sind Einsätze im Polizei- und Rettungswesen, im Bauwesen und Inspektion von Energie- und Wasserwirtschaft sowie der Land-/Forstwirtschaft und Vermessung. Ein breites Anwendungs- und Forschungsfeld ist zudem die Logistikbranche.
Rechtlicher Hintergrund
Das nationale Luftrecht unterscheidet zwischen unbemannten Luftfahrtsystemen und Flugmodellen. Gemäß § 1 des Luftverkehrsgesetzes [1] handelt es sich bei unbemannten Luftfahrtsystemen um ausschließlich gewerblich genutzte Geräte. Flugmodelle sind hingegen privat, also zum Zwecke des Sports oder der Freizeitgestaltung, genutzte Geräte. Die rechtlichen Rahmenbedingungen zur Nutzung von Drohnen für private und gewerbliche Zwecke sind in der 2017 in Kraft getretenen Drohnenverordnung [2,3] geregelt. Hier werden die Drohnen nach Gewicht klassifiziert. Kleinere Drohnen ab 0,25 kg müssen mit einer Plakette versehen werden, die den Namen und die Adresse des Eigentümers aufweist. Bei Drohnen von 2 kg bis 5 kg ist von dem Steuerer zusätzlich ein Kenntnisnachweis nach § 21d LuftVO mitzuführen. Dieser wird von einer vom Luftfahrt-Bundesamt anerkannte Stelle ausgestellt und ist fünf Jahre gültig. Für den Betrieb von Drohnen über 5 kg und für den Betrieb bei Nacht ist eine Erlaubnis erforderlich. Diese wird von den Landesluftfahrtbehörden erteilt. Auch ab einer Flughöhe von 100 m ist eine behördliche Ausnahmeerlaubnis einzuholen.
Mit dem Inkrafttreten der Verordnung (EU) 2018/1139 des Europäischen Parlaments und des Rates vom 4. Juli 2018 zur Festlegung gemeinsamer Vorschriften für die Zivilluftfahrt und zur Errichtung einer Agentur der Europäischen Union für Flugsicherheit [4] unterliegen unbemannte Luftfahrzeuge unabhängig von ihrem Betriebsgewicht dem Geltungsbereich dieser Luftfahrt-Grundverordnung. Es ist der Europäischen Kommission damit möglich Durchführungsverordnungen für den Betrieb von Drohnen und Anforderungen an Technik und Personal eigenmächtig zu erlassen. Derzeit sind zwei Verordnungen veröffentlicht. Sie lösen die unterschiedlichen nationalen Bestimmungen der europäischen Mitgliedsländer durch einheitliche Regeln ab.
Die Durchführungsverordnung (EU) 2019/947 [5] regelt die Betriebsvorschriften für Drohnen. Die Delegierte Verordnung (EU) 2019/945 [6] beschreibt die Bauvorschriften bzw. Eigenschaften von Drohnen in den verschiedenen Kategorien. Erstmalig gibt es im Anhang zur Delegierten Verordnung eine EU-einheitliche Geräuschbewertung von Drohnen der Kategorie “offen“. Hier wird ein Labeling des garantierten Schallleistungspegels ähnlich der „Outdoor-Richtlinie“ [7] eingeführt. Die Ermittlung dieses Pegels soll über die EN ISO 3744:2010 [8] mittels eines Hüllflächenverfahrens erfolgen. Die Hersteller sind verpflichtet den garantierten Schallleistungspegel auch im Rahmen der CE-Kennzeichnung zu dokumentieren. Ebenso wird in der EU-Regelung ein maximal zulässiger Schallleistungspegel angegeben. Dieser ist vom Gewicht der Drohne abhängig.
Drohnen und Lärm
Drohnen verfügen über eine weite Bandbreite an unterschiedlichen Geräuschmerkmalen. Als Hauptgeräuschkomponenten lassen sich die Strömungsgeräusche der Propellerbewegungen ausmachen. Neben tonalen Komponenten können Drohnengeräusche im Schalldruckpegel schwanken, stottern, rattern, brummen oder zischen. Dabei hängt die Geräuschentwicklung stark mit dem Flugmodus der Drohne zusammen.
Hovern – das Stehen in der Luft – verfügt oftmals über eine gänzlich andere Geräuschzusammensetzung als ein Überflug oder ein Richtungswechsel. Das Geräuschverhalten verändert sich stark, wenn eine Drohne steigt, sinkt oder im Flug die Richtung ändert. Auch die Fluggeschwindigkeit, die momentane Windstärke, die Last und die Beschleunigung haben einen Einfluss auf das Geräuschverhalten der Drohnen.
Geräuschvergleich unterschiedlicher Betriebsmodi
Um die Einflüsse unterschiedlicher Flugmodi auf die Geräuscherzeugung zu analysieren, wurden exemplarisch mit einer Drohne (Quadrokopter) Messungen über Rasenfläche in folgenden Betriebszuständen durchgeführt:
- Hovern in 1,2 m Bodennähe,
- Hovern in 5 m Höhe im Freien,
- Steigen,
- Sinken,
- gerade Überflüge und
- Richtungsänderungen (Manövrieren).
Die Ergebnisse sind in Tabelle 1 dargestellt.
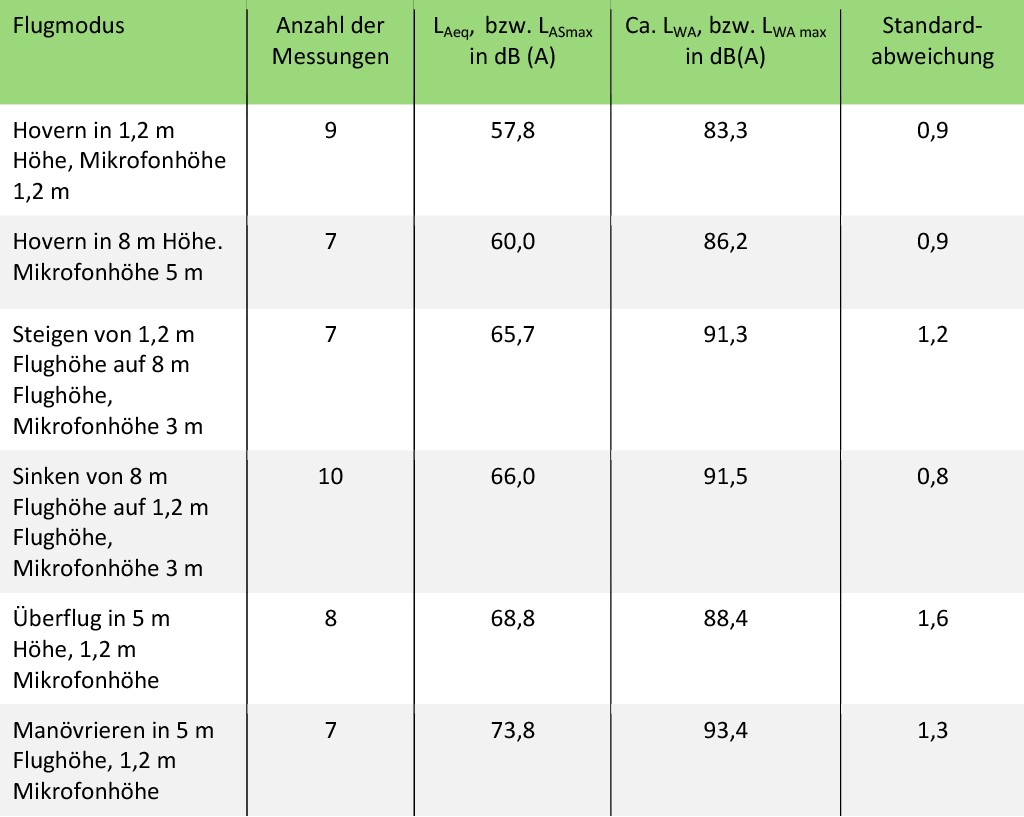
Tabelle 1 Einflüsse unterschiedlicher Flugmodi auf die Geräuscherzeugung.
Während den Messungen „Steigen“ und „Sinken“ wurde die Drohne in einem Abstand von 7,5 m zum Mikrofon in 3 m Höhe auf und ab bewegt. Dabei erzeugte die Drohne bei „Steigen“ und „Sinken“ ungefähr die gleichen maximalen Schalldruckpegel. Beim Manövrieren wurde die Drohne in 5 m Höhe über einem 1,2 m hohen Mikrofon in verschiedene Richtungen bewegt.
Die Schallleistungspegel wurden rechnerisch aus den Schalldruckpegeln ermittelt. Die Schalldruckpegelabnahme wurde aufgrund der geometrischen Schallausbreitungsbedingungen berücksichtigt. Der für die unterschiedlichen Betriebszustände der Drohne ermittelte Schallleistungspegel, variiert zwischen 83 dB und 94 dB.
Bei bewegten Messungen wurde der Maximalpegel ausgewertet. Das entspricht dem Pegel, der zum Zeitpunkt des Vorbeiflugs in einem definierten Abstand ermittelt wurde.
Das Fliegen von Manövern führt zu den höchsten Schalldruckpegeln. Auch das Steigen und Sinken erzeugt vergleichsmäßig hohe Schalldruckpegel. Geringere Schalldruckpegel erzeugt die Drohne beim geraden Überflug. Die niedrigsten Schalldruckpegel wurden für das Hovern ermittelt.
Das Hovern in 1,2 m Flug- und 1,2 m Messhöhe ergibt einen geringeren Schalldruckpegel als die Messungen in 8 m Flughöhe und 5 m Messhöhe. Dies lässt sich durch die ausgeprägte Richtcharakteristik der Drohne erklären. Bei 1,2 m Flug- und Messhöhe liegen Drohne und Mikrofon in einer horizontalen Ebene. Die Bodenreflexionen wurden in der Messsituation aufgrund des Grasuntergrunds reduziert. Bei einer Flughöhe von 8 m, einer Messhöhe von 5 m und einem horizontalen Messabstand von 7,5 m fliegt die Drohne in einem ca. 25°-Winkel über dem Mikrofon. Die nach unten stärker ausgeprägte Schallabstrahlung der Drohne wird bei den Messungen stärker erfasst.
Richtcharakteristik
Zur Bestimmung der Richtcharakteristik wurden 8 Mikrofone in einem Kreis mit 3 m Durchmesser im 45°-Winkel horizontal und vertikal um den Mittelpunkt des Messobjektes angeordnet. (siehe Bild 1)
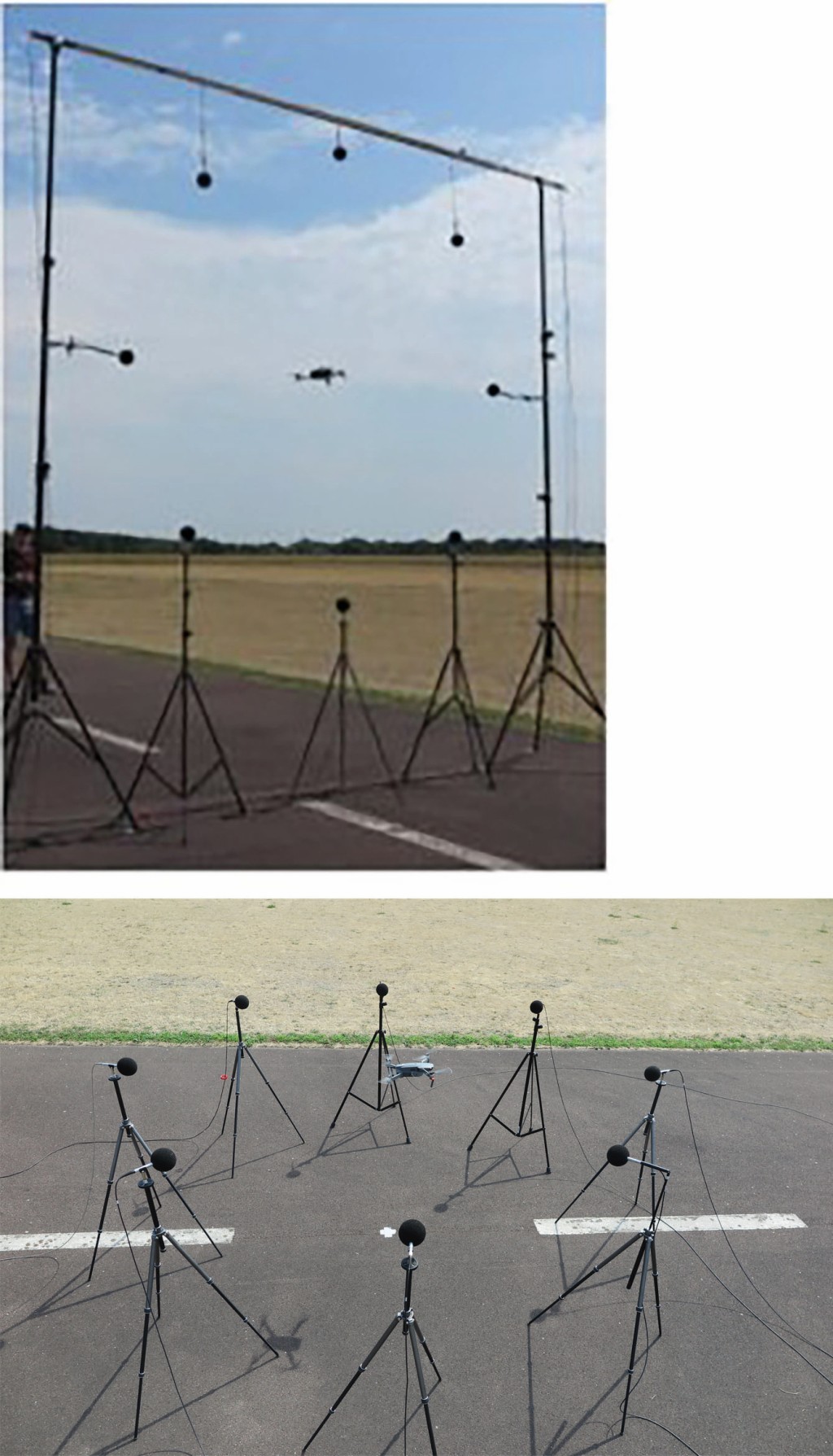
Bild 1 Messaufbau zur Bestimmung der vertikalen und horizontalen Richtcharakteristik.
Wie Bild 2 zeigt, besitzen Drohnen in horizontaler Ebene eine ausgeprägte Richtcharakteristik über alle Frequenzen (A-bewerteter Summenpegel). Die gemessenen Schalldruckpegel sind gemessen unterhalb und oberhalb der Drohnen um bis zu 10 dB höher als zur Seite.
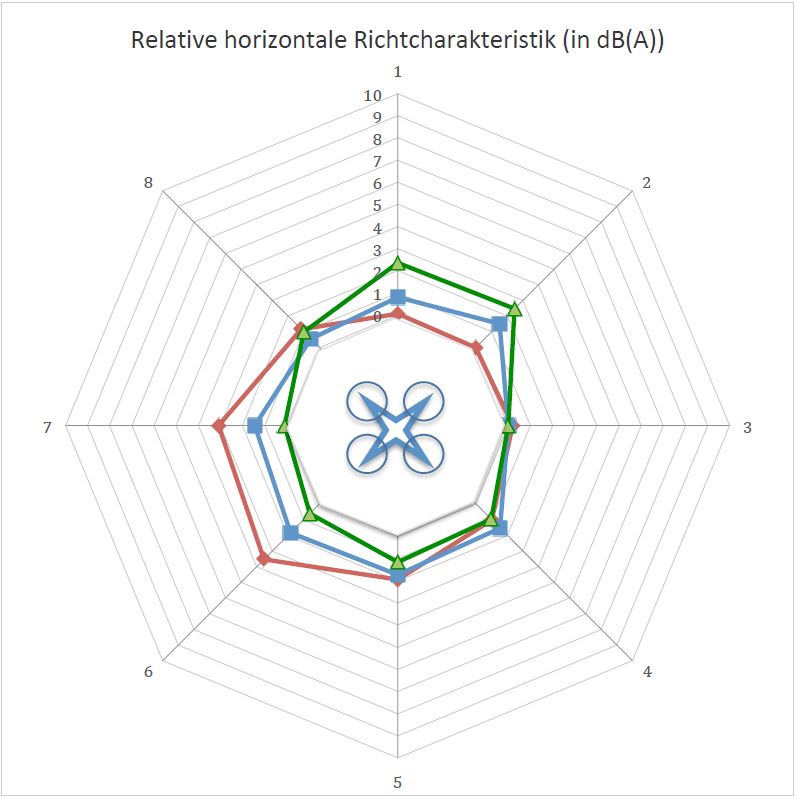
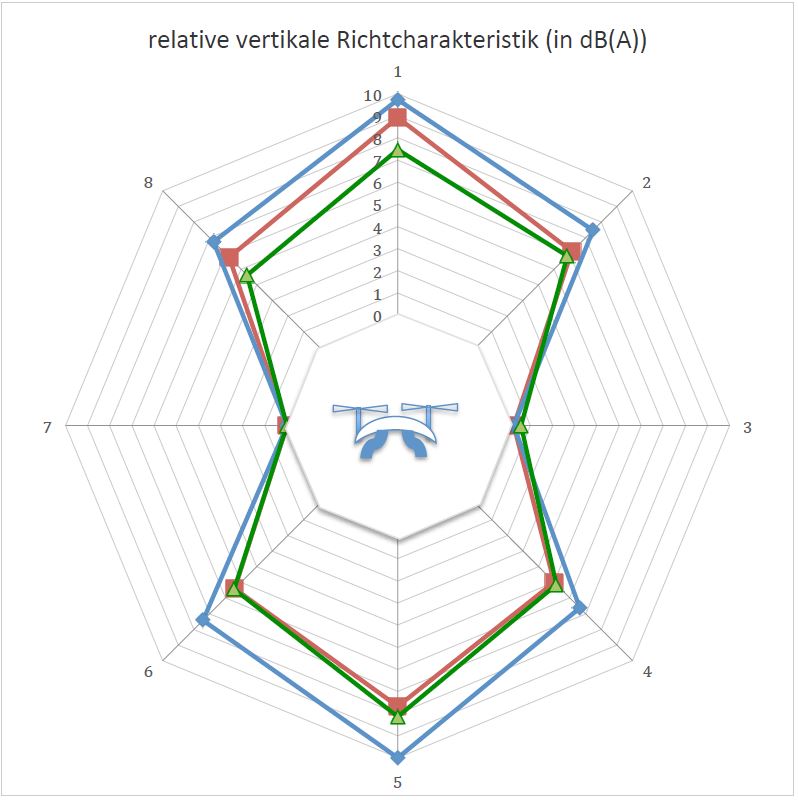
Bild 2 vertikale und horizontale Richtcharakteristik (grün – Drohne 1; rot – Drohne 2; blau – Drohne 4).
In vertikaler Ebene besitzen die untersuchten Drohnen aufgrund der symmetrischen Anordnung der Propeller hingegen keine ausgeprägte Richtcharakteristik. Der Schall wird nahezu in alle Richtungen gleichmäßig abgestrahlt.
Überflug-Geräuschmessverfahren zur Darstellung der Realimmissionen
Geräuschmessverfahren sollen dazu dienen ein Gerät oder Produkt bezüglich seiner immissionsseitigen Geräuscheinwirkung zu bewerten. Deshalb sollte ein Geräuschmessverfahren von einer realen Einsatz- und Betriebsweise ausgehen.
Ein Geräuschmessverfahren zur Beurteilung von Modellflugzeugen über 25 kg ist im Neunten Abschnitt der Lärmvorschrift für Luftfahrzeuge (LVL) [9] verankert. Zur Erfassung der Realemissionen von Drohnen wurden, angelehnt an die LVL, Überflugmessungen mit sieben verschiedenen Drohnenmodellen durchgeführt. Alle Modelle hatten ein Gewicht unter 2 kg.
Die Messpunkte befanden sich in einer Höhe von 1,2 m über dem Boden. Der Überflug fand in 3 m Höhe statt. Somit war der Abstand von Messposition zu Bezugspunkt 1,8 m. Der Bezugspunkt war in diesem Fall die Mitte der Verbindungslinie der am weitesten außen liegenden Propellernaben. Weitere Mikrofone standen rechts und links in 7,5 m Entfernung zur mittleren Mikrofonposition.
Die Messungen wurden im Juli 2018 auf dem Modellflugplatz des Modellflugclub „Hugo Junkers“ Dessau-Rodleben e. V. durchgeführt. Die Flüge fanden im Flugsektor A statt. Der Flugsektor A verfügt über eine asphaltierte Start- und Landebahn. Das restliche Gelände ist mit Rasen bedeckt. Die weitere Umgebung ist frei von Hindernissen, wie Bebauung oder Bepflanzung (Bild 3).

Bild 3 Überflugmessungen mit verschiedenen Drohnentypen.
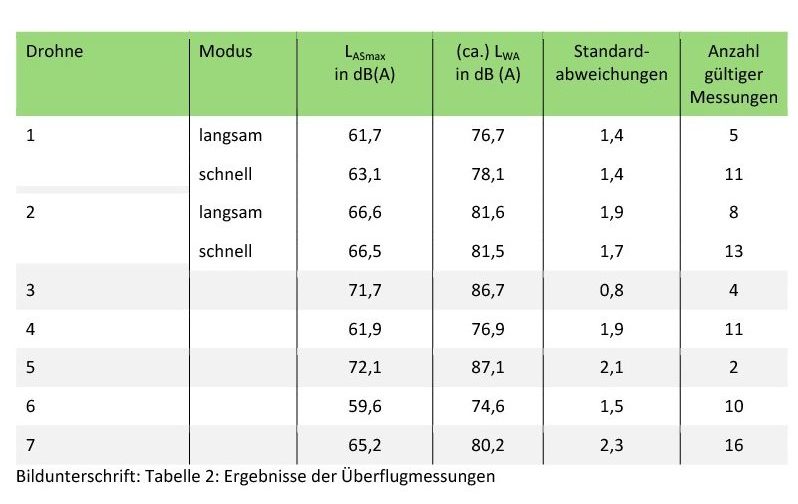
Tabelle 2: Ergebnisse der Überflugmessungen
Eine wesentliche Herausforderung bei den Messungen war die Steuerung der Drohnen in exakter Überflughöhe, zentriert über dem mittleren Mikrofon. Viele Messungen mussten wiederholt werden, da die Drohne beim Anflug in die Messebene an Höhe zulegte oder verlor oder geringfügig vom Kurs abwich. Manövrieren im Anflugbereich oder in der Messebene führt dazu, dass die Geschwindigkeit und die Beschleunigung der Drohne verändert werden. Das wirkt sich auf die Geräuschentwicklung aus. Ein geeignetes Hilfsmittel zur Validierung der Messung, ist zum Beispiel eine Lichtschranke.
Tabelle 2 zeigt die mittels Überflug ermittelten slow-bewerteten mittleren Maximalpegel für die untersuchten Drohnen. Die ermittelten Maximalpegel zeigen innerhalb der Modelle eine hohe Streuung von mehr als 12 dB(A) auf.
Psychoakustische Eigenschaften – Lautheit, Schärfe
Durch die immer weitere Verbreitung von Drohnen, können sich Anwohnerinnen und Anwohner durch den Fluglärm belästigt fühlen. Laut einer psychoakustischen Studie der NASA von 2017 [10] empfinden wir Drohnengeräusche störender als Autogeräusche. Für diese Studie wurden Probandinnen und Probanden Aufnahmen von Drohnen in unterschiedlichen Flughöhen und Geschwindigkeiten vorgespielt. Die Probanden wurden nicht informiert, dass es sich um Drohnengeräusche handelt.
Zusätzlich zum Schalldruckpegel wurden während der Überflugmessungen die psychoakustischen Parameter Lautheit und Schärfe durch ein binaurales Messsystem erfasst. Der Messaufbau unterschied sich nicht zu der im vorhergehenden Kapitel beschriebenen Messung. Die Schärfe ist ein Indikator der Verteilung von hohen und tiefen Frequenzen in einem Geräusch. Je mehr hohe Frequenzen enthalten sind desto schärfer wird ein Geräusch empfunden. Die Ergebnisse für Schärfe und Lautheit sind in Tabelle 3 zusammengefasst.
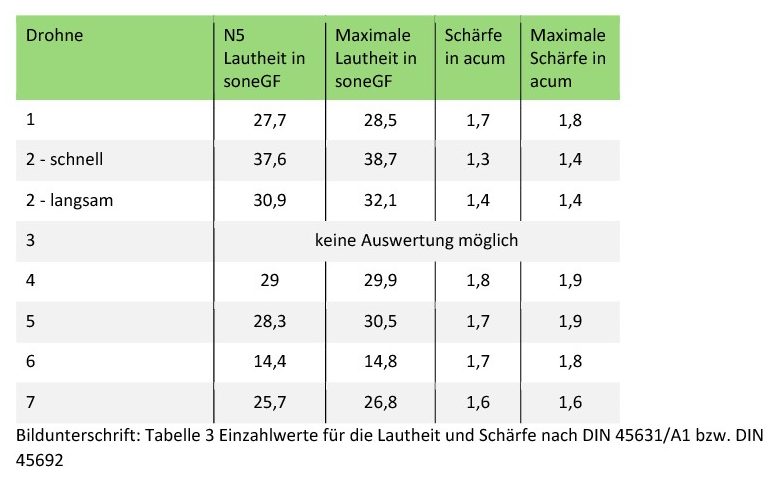
Tabelle 3 Einzahlwerte für die Lautheit und Schärfe nach DIN 45631/A1 bzw. DIN 45692.
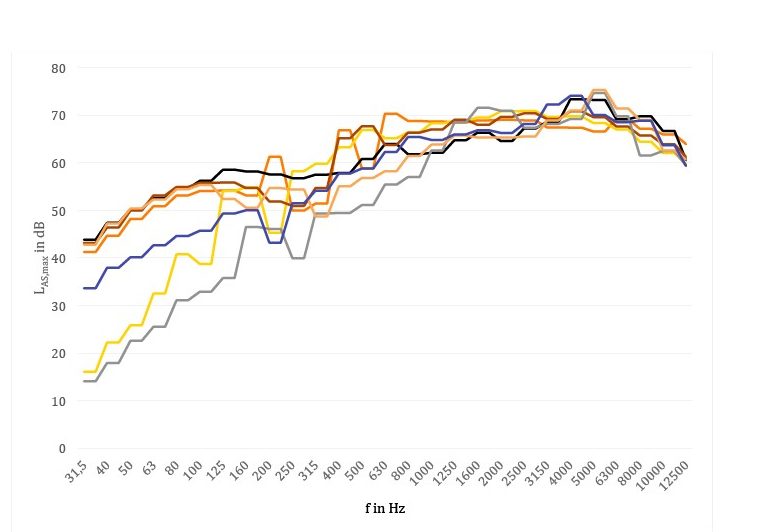
Bild 4 Normierte Terzspektren verschiedener Drohnenmodelle beim Überflug (orange – Drohne 1; gelb – Drohne 2; schwarz – Drohne 3; rot – Drohne 4; grau – Drohne 5; grün – Drohne 6; blau – Drohne 7).
In Bild 4 sind die Terzspektren der gemessenen Drohnenüberflüge zum Zeitpunkt des Maximalpegels dargestellt. Die Terzspektren sind unbewertet und wurden auf einen Summenpegel von 80 dB normiert. Es ist erkennbar, dass das Drohnengeräusch hauptsächlich durch den Bereich 1 bis 10 kHz bestimmt wird. Im Bereich unter 200 Hz weiten sich die gemessenen Spektren auf. Bei den untersuchten Drohnenmodellen trägt der tieffrequente Bereich allerdings wenig zum Gesamtgeräusch bei.
Die Lautheit hängt von der spektralen Verteilung ab. Sie berücksichtigt die pegelabhängige Lautheitswahrnehmung bei unterschiedlichen Tönen und die Dauer sowie Simultan- und Nachverdeckungseigenschaften des menschlichen Gehörs [11]. 20 sone entsprechen bei einer Frequenz von 1 kHz ca. 85 dB.
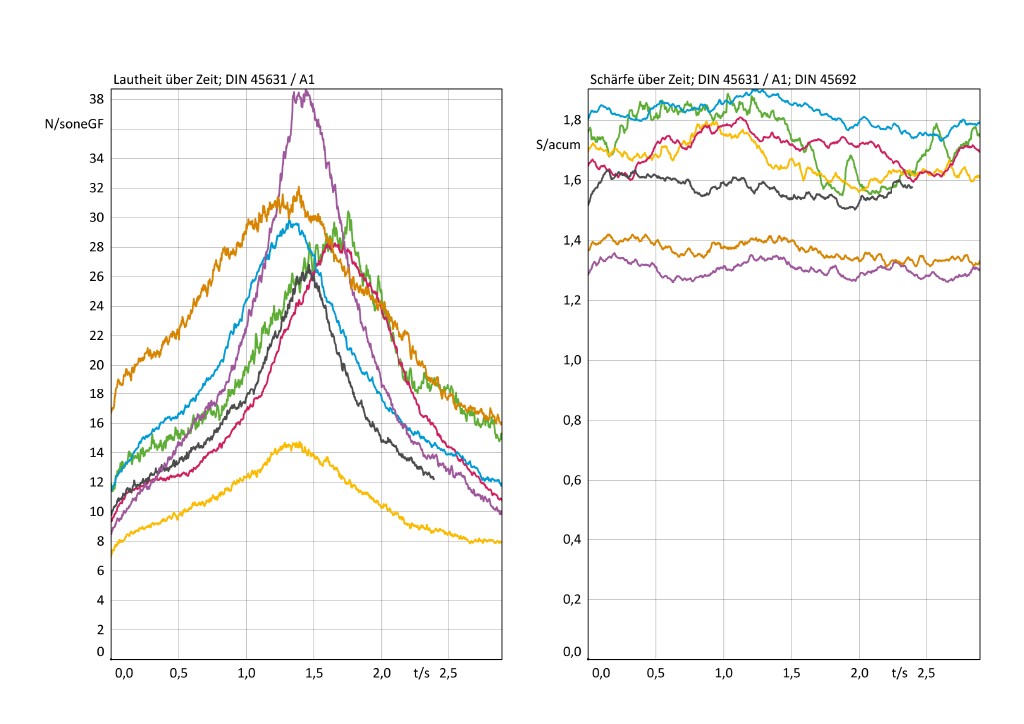
Bild 5 Lautheit und Schärfe nach DIN 45631/A1 bzw. DIN 45692 (rosa – Drohne 1; lila – Drohne 2; schnell; ocker – Drohne 3; langsam; blau – Drohne 4; grün – Drohne 5; gelb – Drohne 6; grau – Drohne 7).
Die in Bild 5 dargestellten Ergebnisse zeigen, dass die leichteste und kleinste getestete Drohne (Drohne 6) die geringste Lautheit hervorruft. Die ermittelte Schärfe ist mit den anderen Modellen vergleichbar. Anders herum verhält es sich bei dem schwersten getesteten Modell (Drohne 2). Diese wird als besonders laut empfunden, weißt aber den geringsten Schärfewert auf.
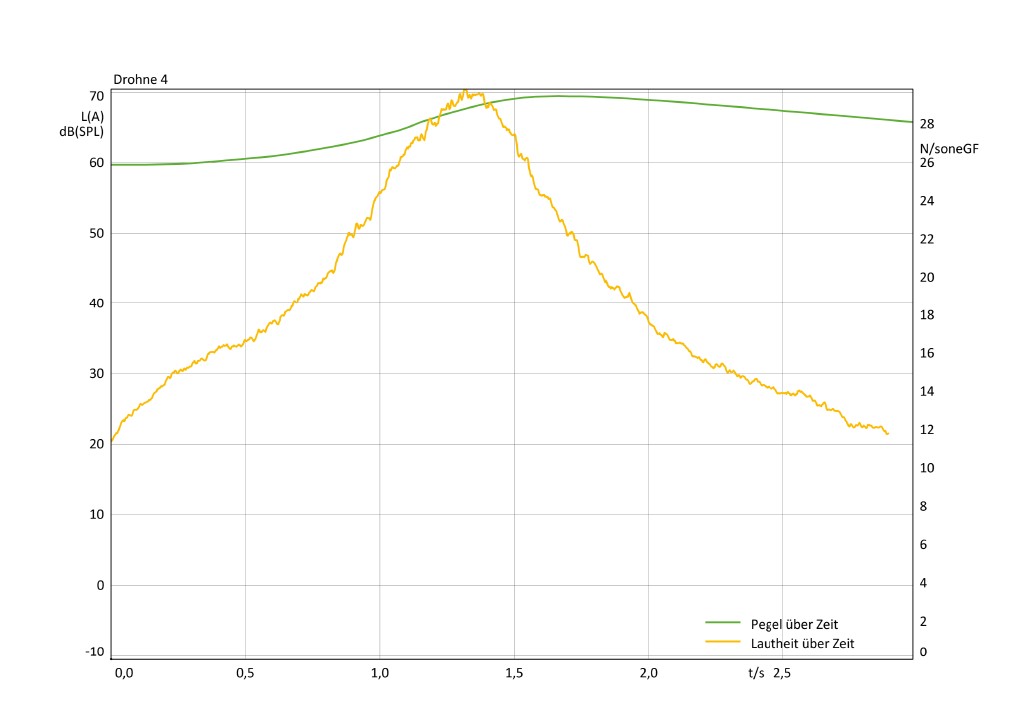
Bild 6 Pegelzeit- und Lautheitszeitverlauf.
Aus dem Pegel- und Lautheitszeitverlauf in Bild 6 ist erkennbar, dass beim Anflug einer Drohne der Moment der lautesten Wahrnehmung kurz vor der eigentlichen Pegelspitze liegt. Ein sich näherndes Flugobjekt wird störender empfunden als ein sich entfernendes Flugobjekt oder ein Flugobjekt im Moment des Überfluges.
Geräuschmessverfahren zur Produktzulassung
Geräuschmessverfahren, die dazu dienen eine Vergleichbarkeit innerhalb einer Produktgruppe herzustellen, müssen vor allem sehr genau und wiederholbar sein. Die ermittelten garantierten Schalldruck- oder Schallleistungspegel müssen innerhalb einer Produktgruppe reproduzierbar sein. Dabei sollten die Realemissionen eines Produktes im Betrieb und der über die Produktzulassung garantierte Schallleistungspegel bestmöglich übereinstimmen. Der Verbraucher kann so anhand der Geräuschkennzeichnung abschätzen, wie viel Lärm sein Gerät im Betrieb tatsächlich verursacht.
In der gegenwärtigen Produktzulassung (CE-Kennzeichnung, Maschinen RL [12], etc.) ist deshalb häufig ein standardisiertes Geräuschmessverfahren vorzufinden. Die Geräuschmessverfahren stellen aus Sicht des Schallschutzes leider nicht zwangsläufig das Worst-Case-Szenario in Bezug auf die Schallerzeugung dar. In manchen Fällen werden Leerlaufmessungen oder Messungen von lastfreien Betriebsmodi durchgeführt. Diese Szenarien sind messtechnisch einfacher zu kontrollieren und führen zu reproduzierbaren Ergebnissen.
Bei den vielfältigen Einflüssen auf die Geräuscherzeugung von Drohnen stellt sich die Frage, wie diese mit einem Messverfahren abgebildet werden können. Das Messverfahren soll für alle Drohnentypen repräsentative Werte liefern und die Realemissionen bestmöglich abbilden.
Die Geräusche von Drohnen variieren durch Beschleunigungen, Manöver und Richtungswechsel und unterliegen zudem dem Flug- und Steuerungsverhalten, Windeinflüssen sowie Einflüssen der Richtcharakteristik.
Sollten Drohnen unter Laborbedingungen vermessen werden, ließen sich die Wind- und Witterungseinflüsse verringern. Das Umweltbundesamt hat erste orientierende Messungen von Drohnen in einem Schallmessraum durchgeführt. Die Erfahrungen zeigen, dass die Messung einer Drohne in einer Laborumgebung viele Herausforderungen mit sich bringt.
Der integrierte Kompass ist anfällig für eine metallische oder elektrische Umgebung. Schlägt die Kalibrierung des Kompasses fehl, sind die meisten Modelle nicht mehr startfähig. Herkömmliche Drohnen verfügen oft über eine Orientierung via GPS, was in geschlossenen Messräumen zu erhöhten Schwierigkeiten beim Manövrieren führen kann. Nur erfahrenen Piloten ist es empfohlen in den manuellen Modus zu wechseln und innerhalb geschlossener Räume zu fliegen. Das begrenzte Raumvolumen von Messlaboren lässt keine oder nur begrenzte Flüge oder Manöver zu. Der einzige sinnvolle Messbetrieb in einer Laborumgebung ist das Hovern. Dieser Zustand ist einige dB leiser, als das Geräusch bei einem Überflug oder beim Steuern der Drohne.
Messungen zur Bestimmung des Schallleistungspegels nach DIN EN ISO 3744:2011 sollen über einen Zeitraum von mindestens 10 s durchgeführt werden. Das Messverfahren ist anfällig für geringfügige Positionsänderungen. Es ist aufgrund der Steuerung der Drohnen nicht ausgeschlossen, dass diese beim Hovern innerhalb von 10 s mehrere Dezimeter driften, das heißt sich langsam aus der Hüllflächenmitte herausbewegen. Ein Gegensteuern, würde die Messung in unkontrolliertem Maße beeinflussen. Eine Fixierung der Drohne führt zu einer Veränderung der Last und des Antriebs. Eine einheitliche Drehzahl der Motoren über alle Modelle ist für den Zustand des Hoverns nicht vorgeschrieben.
Auch bei einer perfekten Flugposition, führt die ausgeprägte Richtcharakteristik von Drohnen zu einer unbekannten Beeinflussung der Messungen nach DIN EN ISO 3744: 2011. Als Ergebnis erhält man sehr hohe Scheinrichtungsmaße. In Halbfeld-Messräumen mit einer reflektierenden Bodenfläche variieren die Pegel in Abhängigkeit der genauen Flughöhe, der Reflexionen des Untergrundes, vom Messradius r und der Größe der Hüllfläche. Umrechnungen von kleineren auf größere Radien müssten erst überprüft werden.
Eine weitere denkbare Laborumgebung zur Messung von Drohnen ist der Hallraum. Der Vorteil eines Hallraums könnte sein, dass die Einflüsse der Richtcharakteristik durch die reflektierenden Oberflächen des Raumes und dem Diffusschallfeld weitestgehend eliminiert werden können. Hier liegen zum aktuellen Zeitpunkt noch keine Messergebnisse vor.
Empfehlungen und Ausblick
Untersuchungen des Umweltbundesamt zeigen das Drohnen ein vielfältiges Geräuschspektrum aufweisen. Je nach Betriebsart variieren die gemessenen Werte um bis zu 10 dB. Dabei führen Manöver zu höheren Schalldruckpegeln als Hovern oder ein geradliniger Flug. Außerdem verfügen Drohnen über eine stark ausgeprägte Richtcharakteristik. Vor allem „nach oben“ und „nach unten“ erzeugen Drohnen um 10 dB höhere Schalldruckpegel als zur Seite. Grundsätzlich lässt sich sagen, dass Drohnen aufgrund der Frequenzzusammensetzung als störend empfunden werden können. Drohnen verfügen dabei über keinen besonderen Anteil tieffrequenter Geräusche.
Ein geeignetes Messverfahren zur Ermittlung eines reproduzierbaren garantierten Schallleistungspegel im Rahmen der Produktzulassung liegt derzeit noch nicht vor. Die von der EU vorgesehene Anwendung der EN ISO 3744:2010 ist nur für das Hovern, also den leisesten Betriebszustand sinnvoll. Außerdem sind bei der Messung in geschlossenen Räumen viele Dinge wie der Umgang mit der Steuerung, den Scheinrichtungsmaßen aufgrund der Richtcharakteristik oder der Größe der Hüllfläche nicht abschließend geklärt. Es sind weitere Untersuchungen nötig um ein einheitliches Messverfahren zu entwickeln, dass auch die Realemissionen sachgerecht abbildet, wobei insbesondere Messungen in einem Hallraum durchgeführt werden sollten.
Zur Verringerung der Umweltauswirkungen des Drohnenbetriebs sind in Zukunft verschiedene Maßnahmen denkbar. Zuerst sollte ein Geräuschlabeling, wie es nun durch die europäische Gesetzgebung vorgesehen ist, verpflichtend eingeführt werden. Dies ist bereits bei verschiedenen anderen auf dem Markt erhältlichen Produkten gängige Praxis.
Wie die Messergebnisse zeigen, müssen Drohnen nicht unbedingt laut sein. Die gemessenen maximalen Geräuschpegel bei einem geradlinigen Überflug ohne Lenken variieren um mehr als 12 dB bei den untersuchten Drohnenmodellen.
Die aktuell vorhandenen Betriebseinschränkungen, wie z. B. die Flugerlaubniserfordernis nachts oder den beschränkten Einsatz von Drohnen in Wohngebieten schützen den Menschen bereits vor einer Belastung durch die Geräusche von Drohnen.
Literatur
[1] Luftverkehrsgesetz in der Fassung der Bekanntmachung vom 10. Mai 2007 (BGBl. I S. 698), das zuletzt durch Artikel 2 Absatz 11 des Gesetzes vom 20. Juli 2017 (BGBl. I S. 2808; 2018 I 472) geändert worden ist.
[2] Bundesministerium für Verkehr und digitale Infrastruktur: Die neue Drohnen-Verordnung – Ein Überblick über die wichtigsten Regeln, Berlin, 2017
[3] Verordnung zur Regelung des Betriebs von unbemannten Fluggeräten vom 30.03.2017 (BGBl. I S. 683)
[4] Verordnung (EU) 2018/1139 des Europäischen Parlaments und des Rates vom 4. Juli 2018 zur Festlegung gemeinsamer Vorschriften für die Zivilluftfahrt und zur Errichtung einer Agentur der Europäischen Union für Flugsicherheit (ABl. L 212 vom 22.8.2018, S.1)
[5] Delegierte Verordnung (EU) 2019/945 der Kommission vom 12. März 2019 über unbemannte Luftfahrzeugsysteme und Drittlandbetreiber unbemannter Luftfahrzeugsysteme (ABl. L 152 vom 11.6.2019, S. 1)
[6] Durchführungsverordnung (EU) 2019/947 der Kommission vom 24. Mai 2019 über die Vorschriften und Verfahren für den Betrieb unbemannter Luftfahrzeuge (ABl. L 152 vom 11.6.2019, S. 45)
[7] Konsolidierte Fassung der Richtlinie 2000/14/EG des Europäischen Parlaments und des Rates vom 8. Mai 2000 zur Angleichung der Rechtsvorschriften der Mitgliedstaaten über umweltbelastende Geräuschemissionen von zur Verwendung im Freien vorgesehenen Geräten und Maschinen, zuletzt geändert durch Verordnung (EG) Nr. 219/2009 des Europäischen Parlaments und des Rates vom 11. März 2009. (ABl. L 162 vom 3.7.2000, S. 1, ABl. L 87 vom 31.3.2009, S. 109)
[8] DIN EN ISO 3744 2011-02: Akustik – Bestimmung der Schallleistungs- und Schallenergiepegel von Geräuschquellen aus Schalldruckmessungen – Hüllflächenverfahren der Genauigkeitsklasse 2 für ein im Wesentlichen freies Schallfeld über einer reflektierenden Ebene (ISO 3744:2010); dt. Fsg. EN ISO 3744:2010
[9] Bekanntmachung der Lärmvorschrift für Luftfahrzeuge (LVL) vom 1. August 2004 NfL II 70/04 geändert durch Bekanntmachung vom 1.Juni 2017 NfL II 349-17
[10] Christian, A.; Cabelly, R.: Initial Investigation into the Psychoacoustic Properties of Small Unmanned Aerial System Noise, NASA Langley Research Center, Hampton, USA, 2017
[11] Genuit, K.; Fiebig, A.: Kritische Betrachtung zum Thema „Lärm“-Messung: Erweiterung von Lärmprognosen durch die Psychoakustik, Zeitschr. f. Lärmbek. Bd. 9 (2014) Nr. 1, S. 12-19
[12] Richtlinie 2006/42/EG des Europäischen Parlaments und des Rates vom 17. Mai 2006 über Maschinen und zur Änderung der Richtlinie 95/16/EG (Neufassung) (ABl. L 157 vom 9.6.2006, S. 24)
Julia Treichel,

Steffen Körper, FG I 2.4, „Lärmminderung bei Anlagen und Produkten, Lärmwirkungen“, Umweltbundesamt, Dessau-Roßlau.
Julia Treichel, Steffen Körper, FG I 2.4, „Lärmminderung bei Anlagen und Produkten, Lärmwirkungen“, Umweltbundesamt, Dessau-Roßlau.








