Vier neue Großroboter für cyber-physikalisches Bauen
Die Universität Stuttgart hat vier Roboterplattformen für die automatisierte Herstellung von Holz- und Faserbauelementen erhalten.
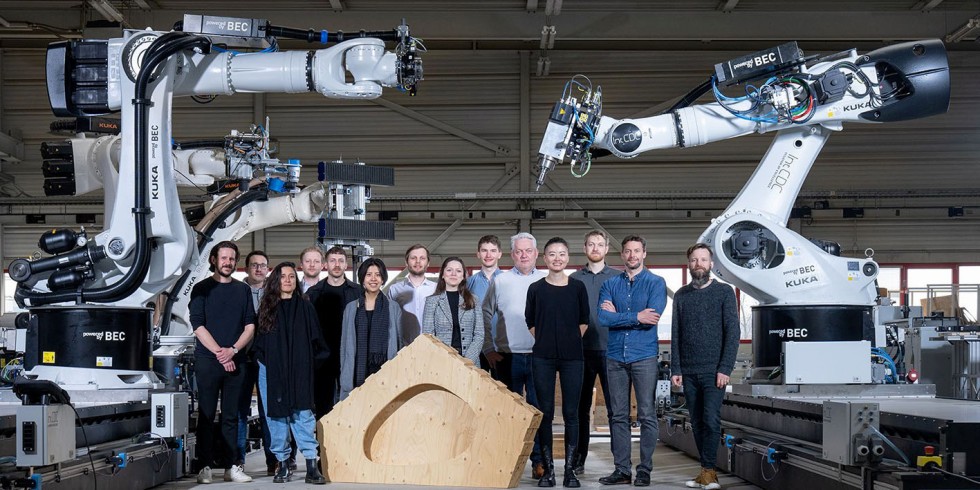
Das Team der robotischen Fertigung im Exzellenzcluster „Integratives computerbasiertes Planen und Bauen für die Architektur“ (IntCDC) der Universität Stuttgart an der Holzplattform des Large-Scale Construction Robotics Laboratory (LCRL).
Foto: Wolfram Scheible / Universität Stuttgart / IntCDC
Die Fabrikhalle in Neustadt-Hohenacker, einem Vorort von Waiblingen, wirkt schmucklos, doch sie birgt Superlative: In ihrem Inneren entsteht die weltweit erste Gesamtplattform für cyber-physikalisches Bauen, das Large-Scale Construction Robotics Laboratory (LCRL), ein Großraum-Robotiklabor und Flaggschiff des Exzellenzclusters „Integratives computerbasiertes Planen und Bauen für die Architektur“ (IntCDC) der Universität Stuttgart. Kernstück des Labs für die mobile, flexible Vorfertigungstechnik sind vier containerbasierte Roboter-Plattformen, von denen zunächst zwei für die Fertigung von Holz- und zwei für Faserbauteile ausgelegt sind. Zukünftig sollen sie auch gemeinsam als rekonfigurierbare, digitale Baufertigungseinheit genutzt werden können.
Gleich im Eingangsbereich der Fabrikhalle gleitet ein tonnenschwerer Roboterarm entlang einer über zehn Meter langen Linearachse, senkt den Kopf langsam zu einem Holzteil herab und fräst daraus ein Kassettenelement für einen Holzpavillon. „Der kann auch schneller, bis zu zwei Meter pro Sekunde“, sagt Hans Jakob Wagner, Doktorand am IntCDC.
Und er kann auch kooperativ: Wenige Meter weiter ist auf einer parallelen Achse ein Zwillingsroboter montiert, beide Giganten können ein Bauteil gemeinsam bearbeiten. Die hohe Steifigkeit ermöglicht sowohl additive als auch subtraktive Fabrikationsschritte mit hoher Präzision. Und das Arsenal an Werkzeugen, über das die Roboter verfügen, ist beachtlich: Fräs- und Sägespindel, verschiedene Greifer, Nagelpistolen, Schraubautomaten, Klebstoffapplikatoren wie auch zahlreiche Kamera- und Sensorsysteme. „Dadurch können wir eine Vielzahl unterschiedlicher Arbeitsschritte durchführen“, sagt Postdoc Dr. Felix Amtsberg, der die Holzplattform koordiniert.
Mega-Wickler für Faserverbundteile
Ähnliche Dimensionen gelten für die Faserplattform ein paar Meter weiter, auf der in Harz getränkte Carbonfasern zu transparenten Leichtbauelementen gewickelt werden. Auch diese Anlage besteht aus zwei Roboterarmen, die an der Achse eines 4 mal 10,5 Meter großen Bauraums entlangfahren und miteinander kooperieren können. Dies ermöglicht es, weitaus größere und komplexere Strukturen anzufertigen als bisher.
„10-Meter-Träger sind locker machbar, ebenso weitgespannte Strukturen“, sagt IntCDC-Doktorand Christoph Zechmeister, der gemeinsam mit Forschenden der Institute für Steuerungstechnik der Werkzeugmaschinen und Fertigungseinrichtungen (ISW) und für Flugzeugbau (IFB) im Cluster die Fertigung neuartiger, extrem leichter, leistungsfähiger und materialeffzienter Faserverbundgroßbauteile untersucht.
Rekonfigurierbar und transportabel
Beide Anlagen lassen sich schnell umprogrammieren, die Werkzeuge im Handumdrehen wechseln. Zudem können sie in einem normalen Überseecontainer und mit Standardtransporten zu Fertigungsbetrieben oder direkt auf die Baustelle gebracht werden – nur ein Strom- und ein Druckluftanschluss ist erforderlich. Die robotische Vorfertigung nahe oder auf der Baustelle ist ein Novum – und eine wichtige Voraussetzung für mehr Effizienz im Bauwesen. „Architektur unterscheidet sich grundsätzlich von anderen Produktionsbereichen, weil hier letztendlich immer Einzelstücke mit projektspezifischen Anforderungen entstehen. Einer Automatisierung, die schon aus Produktivitätsgründen und wegen dem erheblichen Fachkräftemangel auch am Bau dringend erforderlich wäre, steht dies zunächst einmal entgegen“, erklärt Prof. Achim Menges, der Direktor des IntCDC.
Einen Ausweg aus diesem Dilemma sucht die Branche bisher in standardisierten Bauteilen, wie sie in ihrer Extremform aus dem Plattenbau bekannt sind. „Der Modulbau führt häufig zu Monotonie und mangelnder Passgenauigkeit gerade im urbanen Kontext und wird dem grundsätzlichen Anspruch, dass jedes Gebäude seinem soziokulturellen Umfeld und geographischen Standort angepasst sein sollte, nicht gerecht“, sagt Menges.
Zudem produziere der Transport von Bauteilen auf der Straße Abgas- und Lärmemissionen und begrenze die Größe der Bauteile. „Daher modularisieren wir nicht das Bausystem, sondern die Vorfertigungsfabrik, indem wir diese rekonfiguierbar und transportabel machen.“
Programmierung erfordert Übersetzung
Eine Herausforderung besteht allerdings darin, dass die in der Architektur gebräuchlichen Entwurfswerkzeuge und Industrieroboter nicht dieselbe Sprache sprechen. Um die Roboter programmieren zu können, müssen die Beschreibungen der Architekten daher in Datenmodelle übersetzt werden. Hierfür ist Interdisziplinarität gefragt, betont erklärt Prof. Alexander Verl, der Leiter des Instituts für Steuerungstechnik der Werkzeugmaschinen und Fertigungseinrichtungen (ISW) der Universität Stuttgart, das diesen Part in das Cluster einbringt. „Wenn der Entwurf zum Beispiel an einer Stelle eine Vertiefung vorsieht, dann müssen wir eine Bahn programmieren und genau parametrieren, wie viel Material der Roboter abtragen soll, in welcher Form und wie oft.“
Die Crux dabei: Die „neue Architektur“ mit ihren ausdifferenzierten und komplexen Baukörpern kennt keine Gleichteile, da jedes Element genau an seine spezifischen Anforderungen angepasst ist, um möglichst leicht und ressourcensparend zu sein. Jedes Kastenbauteil einer Holzkonstruktion, jedes Faserelement einer Tragstruktur hat eine andere Geometrie.
„Unsere Maxime ist es, dass die Hardware gleich bleibt und die Anpassung an die unterschiedlichen Bauformen durch Umprogrammierung eines digitalen Zwillings erfolgt – und das in einem hochkomplexen Steuerungs- und Regelungsumfeld“, sagt Verl. Dabei sei nicht nur künstliche, sondern vor allem auch menschliche Intelligenz gefragt. „Wir müssen deterministisch überlegen, was genau gebraucht wird und in welcher Stellung des Roboters ein Arbeitsschritt sinnvoll ausgeführt werden kann.“
Zusammenspiel von Mensch und Maschine
Trotz aller Automatisierung: Im Produktionsprozess sollen nicht Menschen durch die Maschine ersetzt werden. Es geht vielmehr um neuartige Möglichkeiten der Zusammenarbeit von Digital- und Handwerk. „Ein erheblicher Teil unserer Forschung im Exzellenzcluster befasst sich daher mit neuen Formen der Mensch-Maschine-Interaktion“, erklärt Achim Menges.
Zum Einsatz kommen dabei zum einen Methoden der Augmented und Mixed Reality, sei es visuell durch das Visualisierungsinstitut Visus der Universität Stuttgart, oder sei es durch haptische Ansätze, die Dr. Katherine Kuchenbecker vom Max-Planck-Institut für Intelligente Systeme vorantreibt. Zum anderen setzen die Forschenden auf die bereits angesprochenen digitalen Zwillinge, mit denen man durchspielen kann, wie ein Mensch mit den Robotern in verschiedenen Situationen interagiert. Letztendlich gehe es darum, die spezifischen Fähigkeiten von Robotern und Menschen auf zielführende Weise zusammenzubringen, betont Menges.
 des Exzellenzclusters IntCDC an der Universität Stuttgart. Foto: Christoph Zechmeister / Universität Stuttgart / IntCDC")
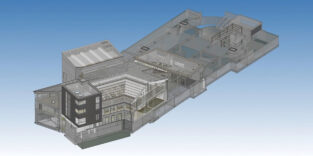
Gesamtansicht des Large-Scale Construction Robotics Laboratory (LCRL) des Exzellenzclusters IntCDC an der Universität Stuttgart.
Foto: Christoph Zechmeister / Universität Stuttgart / IntCDC
Plattform wird zum Kernstück des künftigen Clustergebäudes
Die neuen Roboterplattformen ergänzen den Gerätepark des Large-Scale Construction Robotics Laboratory, zu dem unter anderem auch zwei Spinnen- und ein Turmkran zur Erforschung der robotischen Kranführung sowie Anlagen für die Betonforschung gehören. Bald soll auch ein autonomes Vehikel zum Lab hinzukommen, das die Werkstücke von Plattform zu Plattform transportiert.
Neustadt-Hohenacker wird nicht der endgültige Standort der Roboterplattformen sein: Bis 2025 soll das LCRL in das neue Clustergebäude auf dem Campus Vaihingen der Universität Stuttgart umziehen. Das Labor wird dort als zentrale Plattform fungieren, die die drei Hauptziele des IntCDC vereint: die Erforschung integrativer und digitaler Planungs- und Ingenieursmethoden, die Entwicklung neuartiger Verfahren für die cyber-physische Vorfertigung und das robotergestützte Bauen vor Ort und die damit verbundene Entstehung intelligenter und nachhaltiger Bausysteme.
Roboter wirken beim Bau ihres eigenen Demonstratorgebäudes mit
Die neuen Roboter sollen dabei zunächst beim Bau des Demonstratorgebäudes eingesetzt werden und dann als Forschungsinfrastruktur darin ihren Platz finden, so Menges. „Das IntCDC-Gebäude wird der gebaute Beweis sein, dass Co-Design, also die digitale Vernetzung von Planungsmethoden, Bauprozessen und Bausystemen, funktioniert und attraktivere wie auch nachhaltigere Gebäude ermöglicht.“
Empfehlung der Redaktion – das könnte Sie auch interessieren:
- Automatisierter Mauerwerksbau: Roboter Hadrian soll europäische Baustellen erobern
- Forschung und Entwicklung: Der schwebende Maurer-Roboter ist da
- Automatisierung: Wo Bau-Roboter sich nützlich machen
- Roboter im Straßenbau: Praxis-Demo autonomer Asphalteinbau auf der B 189
- Additive Fertigung von Betonelementen: Roboter drucken weltweit erste 3D-Schwibbögen aus Hightech-Beton