Origami-Rad für den Mond: So klettern Rover künftig in Lavaröhren
Ein Origami-inspiriertes Rad soll kleinen Rovern den Zugang zu Mondlavaröhren ermöglichen. Tests zeigen hohe Stabilität und Traktion.

Variable statt starre Räder: Ein neues Rover-Konzept soll Mondlavaröhren erreichbar machen und Risiken kleiner Missionen senken.
Foto: Korea Advanced Institute of Science and Technology (KAIST)
Der Mond gilt seit Jahrzehnten als gut kartiert. Doch ein genauer Blick zeigt Lücken. Vor allem steile Mondgruben und unterirdische Lavaröhren entziehen sich klassischen Rovermissionen. Genau dort setzen Forschende aus Südkorea an.
Ein Team des Korea Advanced Institute of Science and Technology (KAIST) und des Unmanned Exploration Laboratory (UEL) hat ein Rad entwickelt, das seine Größe verändern kann. Das Konzept ist von Origami-Prinzipien inspiriert und soll kleinen Rovern Zugang zu bisher unerreichbaren Regionen verschaffen. Die Ergebnisse erschienen in der Dezemberausgabe von Science Robotics.
Warum Lavaröhren für die Raumfahrt interessant sind
Mondlavaröhren und tiefe Gruben sind mehr als geologische Kuriositäten. Sie bieten natürlichen Schutz vor kosmischer Strahlung, extremen Temperaturschwankungen und Mikrometeoriten. Deshalb gelten sie als mögliche Standorte für künftige menschliche Aufenthalte. Das Problem liegt im Zugang. Die Eingänge sind steil, der Untergrund instabil. Klassische Rover mit starren Rädern scheitern oft schon an der Kante.
Große Rover könnten diese Hindernisse eher überwinden. Sie sind jedoch teuer, schwer und anfällig. Fällt ein einzelnes System aus, ist die Mission beendet. Die Raumfahrt setzt daher zunehmend auf Schwärme kleiner Rover. Sie sind leichter, günstiger und bieten Redundanz. Wenn ein Gerät ausfällt, arbeiten die anderen weiter. Doch genau diese Miniaturisierung bringt ein physikalisches Problem mit sich: Kleine Räder kommen über große Hindernisse nicht hinweg.
Variable Räder als Ausweg – bislang nur Theorie
Die Idee ist nicht neu. Räder mit variablem Durchmesser könnten auf glattem Terrain klein bleiben und sich bei Bedarf vergrößern. In der Praxis scheiterten solche Konzepte bisher an der Mechanik. Gelenke, Scharniere und Aktuatoren reagieren empfindlich auf Mondstaub. Hinzu kommt das Vakuum. Metalle können dort ohne Schmierstoffe aneinander haften bleiben. Fachleute sprechen von Kaltverschweißung. Für bewegliche Bauteile ist das ein ernstes Risiko.
Hier wird Ihnen ein externer Inhalt von youtube.com angezeigt.
Mit der Nutzung des Inhalts stimmen Sie der Datenschutzerklärung
von youtube.com zu.
Ein Rad ohne klassische Gelenke
Das Team um Professor Dae-Young Lee vom Fachbereich Luft- und Raumfahrttechnik der KAIST wählte einen anderen Ansatz. Statt auf komplexe Mechanik setzt das Rad auf Struktur. Grundlage ist das Prinzip der sogenannten Da-Vinci-Brücke. Dabei tragen sich einzelne Elemente gegenseitig, ohne fest verbunden zu sein. Kombiniert mit Origami-Design entsteht eine flexible, aber stabile Form.
Das Ergebnis ist ein luftloses Rad, das seinen Durchmesser von 230 mm auf 500 mm vergrößern kann. Im eingefahrenen Zustand bleibt der Rover kompakt. Beim Klettern klappt sich das Rad auf und überwindet Stufen, Geröll oder steile Kanten. Möglich wird das durch einen elastischen Metallrahmen und gespannte Gewebestrukturen. Klassische Scharniere fehlen. Damit sinkt das Risiko für Staubschäden und Kaltverschweißung deutlich.
Tests unter Mondbedingungen
Die Forschenden beließen es nicht bei Simulationen. Sie testeten das Rad mit künstlichem Mondboden, sogenannten Regolith-Simulanzien. Dabei zeigte das System eine stabile Traktion auf losem Untergrund. Auch Belastungstests gehörten dazu. Das Rad überstand einen Aufprall, der einem Sturz aus 100 m Höhe unter Mondschwerkraft entspricht. Für kleine Rover ist das relevant, da Abstürze an Grubenkanten kaum zu vermeiden sind.
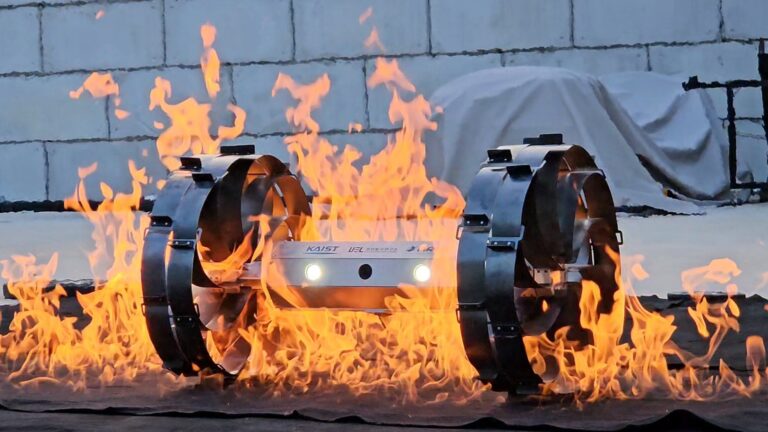
Selbst hohe Temperaturen und Feuer können den Rädern nichts anhaben.
Foto: Korea Advanced Institute of Science and Technology (KAIST)
Bedeutung für künftige Missionen
An dem Projekt waren auch Fachleute aus weiteren koreanischen Raumfahrtinstituten beteiligt. Professor Lee bezeichnete das Rad als praktikable Lösung für die Navigation in besonders schwierigem Gelände. Er verwies zugleich darauf, dass neben der Mobilität weitere Herausforderungen bleiben. Dazu zählen Kommunikation in unterirdischen Strukturen und eine verlässliche Energieversorgung. Dennoch sieht er das Team gut positioniert für künftige Mondmissionen.
Aus planetenwissenschaftlicher Sicht rücken neue Ziele in Reichweite. Dr. Chae Kyung Sim, Leiter der Planetenforschungsgruppe am Korea Astronomy and Space Science Institute (KASI), sprach von Mondgruben als „natürliches geologisches Erbe“. Der Zugang zu diesen Strukturen sei bislang vor allem ein technisches Problem gewesen. Das neue Rad senke diese Hürde spürbar und mache reale Erkundungen wahrscheinlicher.
Auch die Auslegung für extreme Temperaturen spielte eine zentrale Rolle. Auf dem Mond schwanken die Temperaturen lokal um bis zu 300 Grad. Dr. Jongtae Jang vom Korea Aerospace Research Institute (KARI) erklärte, dass das Rad mithilfe mathematischer Thermomodelle optimiert wurde. Ziel war es, Materialspannungen und Verformungen unter diesen Bedingungen zu beherrschen.


Ein Baustein, kein Allheilmittel
Das Origami-Rad löst nicht alle Probleme der Mondexploration. Es ersetzt keine leistungsfähige Energiequelle und keine stabile Funkverbindung. Es zeigt jedoch, wie sich bekannte Einschränkungen kleiner Rover umgehen lassen. Statt größer und schwerer zu werden, passt sich das System an die Umgebung an. Für Missionen, die auf viele kleine Einheiten setzen, ist das ein strategischer Vorteil.
Langfristig könnte das Konzept auch jenseits des Mondes interessant werden. Ähnliche Herausforderungen stellen sich auf dem Mars oder bei Asteroidenmissionen. Überall dort, wo Gewicht, Zuverlässigkeit und Anpassungsfähigkeit zählen, bieten transformierbare Strukturen neue Optionen.
Ein Beitrag von: