Wie kann KI dynamische Verkehrsituationen vorhersagen
Mit Partnern hat ZF erforscht, wie KI dynamische Verkehrssituationen vorhersagen kann. Ergebnis: die neue Methode ist besser als bisherige Ansätze.
Blick in die Zukunft: Im Forschungsprojekt KISSaF arbeiteten ZF, der Lehrstuhl für Regelungssystemtechnik (RST) der TU Dortmund und der Entwicklungsdienstleister INGgreen gemeinsam an einer KI-basierten Szenenprädiktion für den Straßenverkehr.
Foto: ZF
Künstliche Intelligenz kann maßgeblich zur Verkehrssicherheit beitragen. Ihr Potenzial beim Meistern unübersichtlicher Verkehrssituationen ist längst noch nicht ausgereizt. Dazu schlossen sich ZF, der Entwicklungsdienstleister INGgreen GmbH und die Technische Universität Dortmund im Jahr 2021 zusammen. Wie ZF mitteilt, trainiert das Projekt KISSaF (KI-basierte Situationsinterpretation für das automatisierte Fahren) KI darauf, die Handlungen von Verkehrsteilnehmern vorherzusagen. So können automatisierte Fahrerassistenzsysteme wie Abstandsregeltempomaten oder Spurwechselassistenten präziser und sicherer agieren. Nach rund drei Jahren ist das Forschungsprojekt laut ZF nun erfolgreich abgeschlossen worden. Die Ergebnisse bestätigen: Die neue Methode funktioniert besser als bislang verwendete Ansätze.

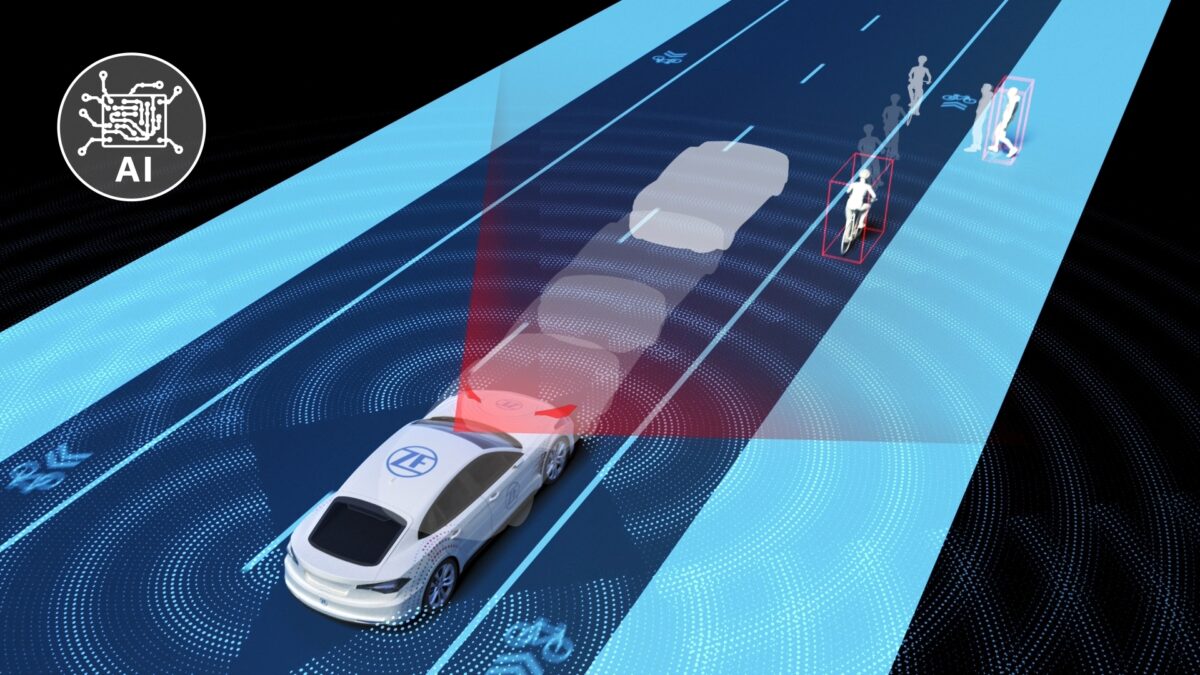
Die Ergebnisse im Projekt KISSaF können dabei helfen, dass automatisierte Fahrassistenzsysteme in unübersichtlichen Verkehrssituationen sicherer agieren.
Foto: ZF
Erfahrene Pkw-Fahrerinnen und -Fahrer wissen: Wer vorausschauend fährt, fährt sicherer. Doch wie ist das bei automatisierten und autonomen Systemen? Heute stoßen KI-Algorithmen laut ZF noch an ihre Grenzen, wenn es darum geht, das wahrscheinliche Verhalten menschlicher Verkehrsteilnehmer vorherzusehen. Wenn sich die KI an dieser Stelle verbessert, kann sich das positiv auf die Sicherheit im Straßenverkehr auswirken – insbesondere dann, wenn immer mehr Fahrzeuge mit hochautomatisierten oder autonomen Assistenzsystemen ausgestattet werden.
Genau das war die Motivation hinter dem Forschungsprojekt KISSaF. Konsortialführer ZF arbeitete gemeinsam mit dem Lehrstuhl für Regelungssystemtechnik (RST) der TU Dortmund und dem Entwicklungsdienstleister INGgreen an einer sogenannten Szenenprädiktion für den Straßenverkehr.
KISSaF: Verkehrstraining für Künstliche Intelligenz
KI-basierte Szenenprädiktion befähigt die Fahrzeugsteuerung, die wahrscheinlichsten Handlungen anderer Verkehrsteilnehmer einige Sekunden vorherzusagen und entsprechend zu agieren:
- Wird der offenbar von seinem Smartphone abgelenkte Fußgänger gleich unachtsam auf die Fahrbahn treten?
- Was ist bei einem automatisiert durchgeführten Spurwechsel zu beachten?
- Bremst der vorausfahrende Wagen noch ab?
- Welche weiteren Faktoren spielen eine Rolle?

Auf mehr als 100.000 km Strecke erfasste ein Versuchsträger neben Kamera-, Radar- und Lidar-Daten auch relevante GPS- und Wetterinformationen. Die Rohdaten des Projekts KISSaF umfassen fast 800 Terrabyte, also 800.000.000 Megabyte.
Foto: ZF
„Um eine KI so zu trainieren, dass sie sicher solche Vorhersagen treffen kann, braucht es große Mengen an Daten aus dem echten Straßenverkehr“, erklärt Dr. Till Nattermann, Leiter des KISSaF-Projekts und Engineering Manager bei ZF. Um diese Realdaten aufzunehmen, konstruierten INGgreen und ZF ein Messfahrzeug, ausgerüstet mit heute schon seriennahen Sensor- und Aktuatoriksystemen. Auf mehr als 100.000 km Strecke erfasste der Versuchsträger neben Kamera-, Radar- und Lidar-Daten auch relevante GPS- und Wetterinformationen. Die Rohdaten des Projekts KISSaF umfassen fast 800 Terrabyte, also 800.000.000 Megabyte. Von der TU Dortmund entwickelte Algorithmen zur Umfeldbeschreibung bereiteten die Daten für die weitere Verwendung im Projekt auf.
„Wir haben bewusst auf ein schon heute praxisnahes Setup gesetzt – sowohl bei der Sensorik zur Datenermittlung als auch beim Automatisierungsgrad der KI-Systeme.“
Auf Basis dieser Umfeldmodellierung trainierten die KI-Spezialisten des ZF-eigenen AI-Labs, dem KI-Technologiezentrum in Saarbrücken, die künstliche Intelligenz. Die Prädiktion konnte dann in der Simulation und mit aufgezeichneten Realdaten in den von ZF bereits entwickelten Assistenzsystemen getestet werden.
Antizipieren statt reagieren: Mehr Sicherheit durch KI
Nach dem Training konnte die KI besser abwägen, wie sich andere Verkehrsteilnehmer verhalten. Die in KISSaF entwickelte Szenenprädiktion könnte künftige Assistenzsysteme befähigen, vorausschauend zu handeln, potenziell gefährliche Situationen besser vorherzusehen und proaktiv zu bremsen oder auszuweichen.
Zum Beispiel erkannte die KI möglicherweise kritische Spurwechsel und brach sie entweder ab oder leitete sie gar nicht erst ein. Entstehende Lücken für einen Spurwechsel konnte sie ebenfalls vorhersehen und das Fahrzeug sicher durch den Verkehr leiten. Auch die Fähigkeit der KI, bei Gegenverkehr an Kreuzungen rechtzeitig zu stoppen, hat sich mit dem im Laufe von KISSaF erarbeiteten Verfahren verbessert.
Die Erkenntnisse der Studie sollen vor allem dabei helfen, hochautomatisierte Fahrerassistenzsysteme (ADAS) der Automatisierungsstufen 2+ und 3 nach SAE zu optimieren, die von zentralen Steuergeräten und Hochleistungscomputern wie der ZF ProAI gesteuert werden können.
„Wir haben bewusst auf ein schon heute praxisnahes Setup gesetzt – sowohl bei der Sensorik zur Datenermittlung als auch beim Automatisierungsgrad der KI-Systeme“, erklärt Nattermann. „Diese Funktionen sind damit näher an der Marktreife als andere Systeme. Rohdaten aus dem Projekt sind darüber hinaus auch für zukünftige Entwicklungsvorhaben relevant. Das Projekt hat somit in mehrfacher Hinsicht hohe Praxisrelevanz für uns“, sagt Nattermann.
Das Projekt KISSaF lief seit Januar 2021 und wurde vom Bundesministerium für Wirtschaft und Energie gefördert. ZF, INGgreen und die TU Dortmund präsentieren die offiziellen Ergebnisse im Rahmen der Veranstaltungsreihe KoTAM (Koordinierung der Testfelder Autonome Mobilität in Deutschland) am 11. April 2024 in Düsseldorf.
Weitere Beiträge zum Thema:








