Lidar-Techniken zur entfernungsaufgelösten Fernmessung atmosphärischer Größen
Zusammenfassung Lidar-Techniken sind Messverfahren zur entfernungsaufgelösten Bestimmung von Bestandteilen der Atmosphäre wie Wolken, Aerosolpartikel und Spurengase sowie von Zustandsparametern der Atmosphäre wie Temperatur und Wind. Die Lidar-Verfahren basieren auf der Wechselwirkung von (zuvor ausgesandter) gepulster elektromagnetischer Strahlung mit den atmosphärischen Volumina und der darauffolgenden zeitaufgelösten Detektion der rückgestreuten Strahlung. Im Beitrag werden die drei Lidar-Richtlinien und die gegenwärtig sich in Bearbeitung befindende Richtlinie „Rückstreu-Lidar“ vorgestellt. Als Beispiel der Nutzung von Lidar-Geräten wird die Bestimmung der Massenkonzentrationen in den abgehobenen Aschewolken genannt, die vom isländischen Vulkan Eyjafjallajökull 2010 über Europa advehiert wurden. Damit verbunden werden zunehmend Lidar-Techniken durch „Nicht-Lidar-Experten“ und im Routinebetrieb eingesetzt, was die Erarbeitung weiterer Lidar-Richtlinien erforderlich macht.

Quelle: PantherMedia/nikkytok
1 Einleitung
Lidar-Geräte gestatten die entfernungsaufgelöste und berührungslose Fernmessung atmosphärischer Größen und Bestandteile. Das Akronym „Lidar“ steht für die englische Bezeichnung „Light Detection and Ranging“, was in etwa mit „entfernungsaufgelöstes Messen mit Licht“ übersetzt werden kann und sich damit an das bereits vorher genutzte Akronym „Radar“ (für „Radio Detection and Ranging“) anlehnt. Der Begriff „Licht“ beschränkt sich hierbei nicht auf den sichtbaren Bereich des Spektrums. Es gibt auch Lidar-Geräte, in denen die Strahlungsquelle (in der Regel ein Laser) Strahlung im ultravioletten oder infraroten Bereich des elektromagnetischen Spektrums generiert. Lidar ist ein „aktives“ Fernerkundungsverfahren, da nicht auf das natürliche Strahlungsfeld des Untersuchungsobjekts zurückgegriffen wird. Heutzutage werden als Strahlungsquelle in der Regel gepulste Laser eingesetzt, die auch speziell für die Messaufgabe etwa durch Wahl der Wellenlänge oder des Polarisationszustands konfigurierbar sind. Die emittierte Strahlung wechselwirkt mit den Molekülen und Partikeln im bestrahlten atmosphärischen Volumen. Je nach Art der untersuchten Wechselwirkung können dann über die rückgestreuten und detektierten zeitaufgelösten Signale verschiedene Messgrößen entfernungsaufgelöst abgeleitet werden, wie z. B. die Zusammensetzung der Atmosphäre (Wolken, Aerosolpartikel, Spurengaskonzentrationen) und der thermodynamische Zustand der Atmosphäre (Temperatur, Wind, Druck). Lidar-Messungen zeichnen sich dadurch aus, dass sie sehr hohe zeitliche und räumliche Auflösungen erlauben und dreidimensionale Abtastungen der Atmosphäre ermöglichen.
Die ersten Lidar-Geräte wurden schon in den 1920er-Jahren mit starken konventionellen Lichtquellen aufgebaut [1]. Kurz nach der Erfindung des Lasers im Jahr 1960 wurde dieser auch in Lidar-Geräten eingesetzt [2], da Laserlicht aufgrund seiner hohen Strahldichte, geringen Divergenz, spektralen Schmalbandigkeit und kurzen Pulsdauer entscheidende Vorteile gegenüber anderen Lichtquellen hat.
Gegenwärtig sind Lidar-Geräte zur Bestimmung von Profilen der atmosphärischen Temperatur, der absoluten und der relativen Feuchte, des Windvektors und von Spurengasen in der Atmosphäre im Einsatz. Die derzeit am weitesten verbreitete Anwendung von Lidar-Systemen basiert auf elastischer Rückstreuung und dient der Sondierung der Aerosolverteilung. Dabei kann der Rückstreukoeffizient als optische Eigenschaft der Partikel in der Atmosphäre vertikal aufgelöst bestimmt werden. Die Bestimmung weiterer optischer Eigenschaften, wie des Extinktionskoeffizienten der Partikel, erfordert technische Erweiterungen der Systeme; mikrophysikalische Eigenschaften können über die Messung der Depolarisation gewonnen werden oder durch numerische Inversionsverfahren [3; 4]. Es ist hervorzuheben, dass die Lidar-Geräte das atmosphärische Volumen und seine Eigenschaften immer unter Umgebungsbedingungen vermessen, d. h die Partikel werden z. B. vor der Messung nicht getrocknet.
In Deutschland betreiben etwa zehn Universitäten und Forschungseinrichtungen Lidar-Entwicklungsarbeit und setzen die selbstentwickelten Systeme für die Entwicklung innovativer Fernerkundungsverfahren ein, sodass Deutschland in diesem Bereich international eine sehr starke Rolle spielt und maßgeblich an der Entwicklung von weltweiten Verbünden komplexer Mehrwellenlängen-Depolarisations-Lidar-Geräten (mit zusätzlichen Raman-Kanälen) für Forschungsaufgaben beteiligt ist (vgl. [5]). Neben diesen bodengestützten Netzwerken gibt es auch erste satellitengestütze Lidar-Systeme; nach einer ersten Demo-Mission im Jahr 1994 ist die erste Langzeitmission zur Aerosolfernerkundung (CALIPSO) seit April 2006 im Orbit.
Ein deutlicher Fortschritt in der Lidar-Forschung wurde unter anderem dadurch ermöglicht, dass in den letzten Jahren eine rasante Entwicklung im Bereich der Lasertechnik stattgefunden hat, sodass immer leistungsstärkere, kompaktere, stabilere und wartungsärmere Strahlungsquellen zur Verfügung stehen. Auch bei den Datenakquisitionseinheiten kam es zu signifikanten Weiterentwicklungen, sodass der Schritt von singulären Forschungsgeräten zu Standardsystemen für den langfristigen Routineeinsatz in automatisierten Netzwerken möglich wurde. Aufgrund der Senkung der Betriebskosten haben inzwischen zahlreiche Wetterdienste Netzwerke aus automatischen Ein-Wellenlängensystemen (Ceilometer) aufgebaut, um die kontinuierliche und dichte Überwachung der Aerosolverteilung (Monitoring) sicherzustellen. Eine der ersten Anwendungen war die Luftraumüberwachung nach dem Ausbruch des Vulkans Eyjafjallajökull im Jahre 2010.
Es ist zu erwarten, dass die Nutzung von Lidar-Geräte auch durch Nicht-Lidar-Experten in den kommenden Jahren weiter ansteigen wird.
2 Funktionsweise von Lidar-Geräten
Grundbestandteile eines Lidars sind die Strahlungsemitter- und die Empfänger-Einheiten. Der Emitter besteht in der Regel aus einem Laser, der gepulste Strahlung emittiert. Die Laserpulse werden über Optiken in die Atmosphäre ausgesendet. Die ausgesendete Strahlung wird in der Atmosphäre an Luftmolekülen und Partikeln in alle Richtungen – davon ein geringer Bruchteil auch unter 180° – gestreut. Das rückgestreute Licht wird mit einem Teleskop gesammelt und über optische Elemente (beispielsweise Interferenzfilter und Polarisationsstrahlteiler) auf die Detektoreinheit geleitet und dort in elektronische Messsignale umgewandelt (Bild 1).
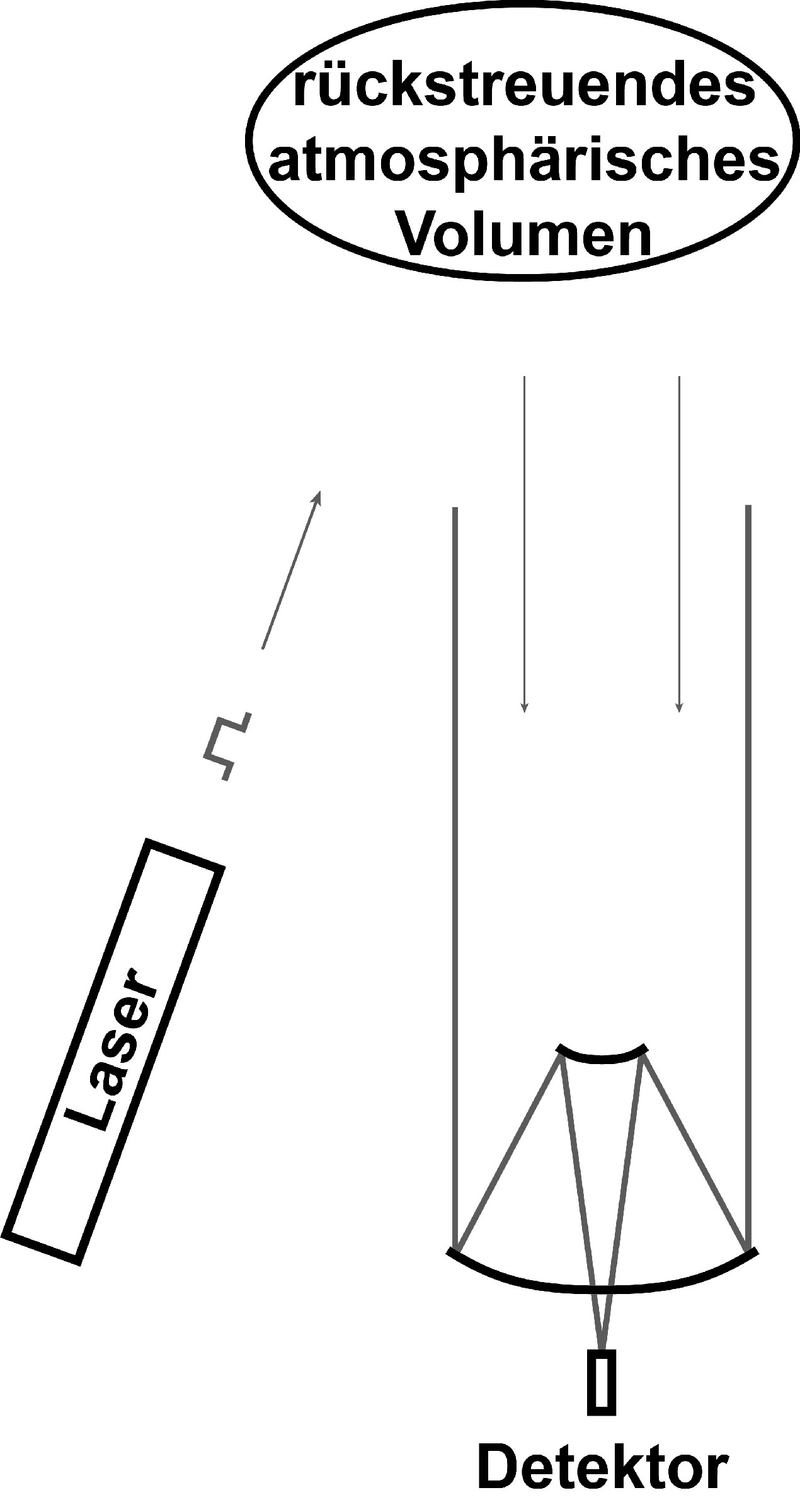
Bild 1. Schematische Darstellung eines einfachen Rückstreulidars.
Foto: Autoren
Die rückgestreute Strahlung von näheren atmosphärischen Volumina erreicht das Lidar-Gerät vor der rückgestreuten Strahlung von ferneren atmosphärischen Volumina. Das Detektorsignal wird zeitaufgelöst bzw. mit Berücksichtigung der Lichtgeschwindigkeit entfernungsaufgelöst erfasst. Da bei der Streuung Kugelwellen generiert werden und das Teleskop einen festen Durchmesser hat, ist das Signal umgekehrt proportional zum Quadrat der Entfernung zwischen dem rückstreuenden Volumen und dem Lidar-Gerät.
Die Lidar-Gleichung verknüpft das aus der Entfernung R bei der Wellenlänge λ gemessene Signal P(λ, R) mit der ausgesendeten Laserpulsenergie P0, mit einer entfernungsabhängigen Gerätefunktion O(R) (Überlappfunktion), mit einer ortsunabhängigen Gerätefunktion η, mit dem Rückstreukoeffizienten β der Luftmoleküle (Index m) und dem der Partikel (Index p) und einem Transmissionsterm, der die Extinktionskoeffizienten der Moleküle αm und der Partikel αp enthält:
Das aufgenommene Signal hängt also von (bestimmbaren) Geräteeigenschaften und atmosphärischen Eigenschaften ab. Ist das vertikale Temperatur- und Druckprofil der Atmosphäre bekannt, verbindet die Gleichung jedoch die beiden unbekannten Größen βp(λ, R) und αp(λ, R) mit nur einer Messgröße P(λ, R). Trotzdem kann die Gleichung für die Bestimmung des Extinktions- oder des Rückstreukoeffizienten von Aerosolpartikeln verwendet werden, wenn man Annahmen zum Lidarverhältnis Sp(λ, R) = αp(λ, R)/ βp(λ, R) macht. Zudem ist eine Kalibrierung des Systems notwendig. Unter typischen atmosphärischen Bedingungen ist die Genauigkeit des abgeleiteten Rückstreukoeffizienten mit 10 bis 20 % größer als die des Extinktionskoeffizienten.
Für eine quantitative Aerosolfernerkundung werden weitere Messkanäle implementiert und durch entsprechende Gleichungen beschrieben. In den letzten Jahren werden vermehrt Raman-Lidar-Systeme eingesetzt, die den Schließungsansatz über das oben erwähnte Lidarverhältnis überflüssig machen. Bei einem Raman-Lidar (inelastisches Lidar) macht man sich die Raman-Rückstreuung an Molekülen bekannter Vertikalverteilung (z. B. die des Stickstoffs) zunutze und misst damit nur die Molekülrückstreuung, womit in der Lidargleichung αp(λ, R) als einzige unbekannte Größe verbleibt. Eine alternative Option, die allerdings apparativ deutlich aufwendiger ist, ist das High-Spectral-Resolution-Lidar (HSRL), bei dem die unterschiedliche Doppler-Verbreiterung der Molekül- und der Partikelrückstreuung ausgenutzt und so die Annahme eines LidarVerhältnisses vermieden wird. Von großem Nutzen haben sich Messungen der Depolarisation erwiesen, da sie die Unterscheidung von kugelförmigen und nicht kugelförmigen (z. B. Vulkanasche) Partikeln erlauben. Man spricht von einem elastischen Lidar, wenn die rückgestreute Strahlung bei der gleichen Wellenlänge wie die der emittierten Strahlung detektiert wird. Bei einem Doppler-Lidar wird die geringe Wellenlängenverschiebung aufgrund des Doppler-Effekts ausgenutzt, um die atmosphärische Windgeschwindigkeit entlang der Beobachtungslinie zu bestimmen. Hierbei wird die Doppler-Verschiebung der rückgestreuten Strahlung durch die Bewegung der Partikel mit dem Wind ausgenutzt und die Frequenzverschiebung direkt oder mit der heterodynen Nachweismethode (kohärente Systeme) erfasst. Bei der heterodynen Detektion wird ein Teil der ausgesendeten Strahlung mit der rückgestreuten Strahlung auf dem Detektor überlagert, sodass eine Schwebung entsteht und nicht die Lichtfrequenz, sondern „nur“ ein Signal mit der Schwebungsfrequenz (durch die Doppler-Verschiebung) im Megahertz-Bereich gemessen wird. Bei den DIfferential-Absorption-Lidars (DIALs) werden die Absorptionscharakteristika von atmosphärischen Spurengasen zu ihrer entfernungsaufgelösten Detektion und Konzentrationsbestimmung genutzt.
Die Erzeugung spektral hochreiner Strahlung bzw. die Detektion derselben nach den Streuprozessen erfordert oft komplexe Systeme. Zum Studium einzelner Systeme, ihrer Anwendung und der realisierten Aufbauten sei neben den VDI-Richtlinien auf Lehrbücher wie z. B. [3; 4] verwiesen.
3 Bereits veröffentlichte technische Regeln
3.1 DAS-Lidar (VDI 4210 Blatt 1)
Als erste VDI-Richtlinie, die ein Lidar-Verfahren zum Gegenstand hatte, erschien im Jahr 1999 die Richtlinie VDI 4210 Blatt 1 [6]. Nach einer allgemeinen Einführung in die Grundlagen der Lidar-Verfahren beschreibt sie das DAS-Lidar (von „Differentielle Absorption und Streuung“ bzw. in Englisch „Differential Absorption and Scattering“), für das sich mittlerweile die Bezeichnung DIAL (von Englisch „Differential Absorption Lidar“) durchgesetzt hat. Motivation für diese Richtlinie war die damals aktuelle Umweltproblematik im Bereich industrieller gasförmiger Schadstoffe, wie Stickoxide, Schwefeldioxid und Ozon, deren Konzentration in Abgasfahnen mit einem DIAL auch aus ein paar Hundert Metern Entfernung bestimmt werden kann. Dies versprach auch kommerzielle Anwendungen und einen gewissen Markt für derartige Messsysteme. Im Rückblick erscheint der damalige Schwerpunkt auf „gasförmige Luftverunreinigungen“ etwas zu einseitig, denn das Verfahren eignet sich nicht nur für „Verunreinigungen“, sondern auch für Konzentrationsmessungen natürlicher Spurengase, wie z. B. des Wasserdampfs oder anderer klimarelevanter Treibhausgase, z. B. [7; 8]. Maßnahmen zur Emissionsbeschränkung haben zudem zumindest in der westlichen Welt die Problematik von „Luftverunreinigungen“ glücklicherweise weitgehend entschärft. Andererseits würden bessere Wasserdampfdaten zu besseren Wettervorhersagen auch von extremen meteorologischen Ereignissen führen, da der Feuchtegehalt der Atmosphäre immer noch mit zu großen Unsicherheiten in atmosphärischen Modellen wiedergegeben wird. Dies wurde im Rahmen meteorologischer Forschungskampagnen wiederholt bestätigt. Hier könnten also z. B. Netzwerke von automatisierten DIAL-Systemen zu Verbesserungen der Wettervorhersagen beitragen.
Wegen seiner Anwendbarkeit auf beliebige Spurengase bleibt das DIAL-Verfahren weiterhin hochinteressant. Ein weiterer gewichtiger Vorteil gegenüber anderen Messverfahren ist die „Selbstkalibrierung“ des Verfahrens, die auch für einen Einsatz über atmosphärische Messungen hinaus, z. B. in der Verfahrenstechnik, attraktiv sein könnte. Allein aus dem relativen Verlauf der Messsignale mit der Entfernung kann die absolute Konzentration eines Spurengases in einem gegebenen atmosphärischen Volumen bestimmt werden. Apparative Größen wie Laserleistung, Teleskopfläche, Effizienz des Senders und Empfängers verändern die Signalintensität und damit die statistische Messgenauigkeit, jedoch nicht die absolute. Allein die Absorptionseigenschaften (genauer gesagt die Absorptionsquerschnitte) des zu detektierenden Stoffes bei den beiden Lidar-Wellenlängen müssen bekannt sein. Sie können entsprechenden Datenbanken entnommen werden und sind in der Regel bis auf wenige Prozent Genauigkeit oder besser im Rahmen von Labormessungen bestimmt worden, sodass auch die DIAL-Messungen mit derselben hohen Genauigkeit durchgeführt werden können.
3.2 Doppler-Wind-Lidar (VDI 3786 Blatt 14 und DIN ISO 28902-2)
Die 2001 erschienene zweisprachige Richtlinie VDI 3786 Blatt 14 [9] behandelt die bodengebundene Fernmessung des vertikalen Windprofils mit einem Doppler-Wind-Lidar. Sie beschreibt nur kohärente Wind-Lidare. Aufgrund der Wellenlängen der verwendeten Laser im nahen Infrarot erfolgt die Rückstreuung an atmosphärischem Aerosol. Der dreidimensionale Windvektor wird durch Sondierung in mindestens drei verschiedene Richtungen (Doppler-Beam-Swinging-Methode, DBS) oder durch konisches Scannen bestimmt. Die Entfernungszuordnung erfolgt über die Signallaufzeit. Für Übersichten siehe z. B. [3; 10].
Zum Zeitpunkt des Erscheinens der VDI 3786 Blatt 14 gab es relativ wenige Wind-Lidare, die aufgrund ihrer aufwendigen Technik, die große optische Tische für den Aufbau der Laseroptiken benötigte, beispielsweise in großen 20-Fuß-Containern [11] untergebracht waren und somit nur in engen Grenzen mobil waren. Kurz darauf setzte eine bei der Erstellung der Richtlinie nicht absehbare rasche technische Entwicklung ein, die zu kleineren und transportableren Geräten führte. Zunächst kam 2002 der Windtracer von Lockheed Martin auf den Markt, der immer noch 2,6 t wog. Diese Geräte mit hoher Reichweite werden heute kommerziell auf einigen Flughäfen und in der Forschung eingesetzt. Die kleinen, von zwei Personen tragbaren handlichen Wind-Lidare, die unter Verwendung der Glasfaser-technik aufgebaut sind und Reichweiten von einigen Hundert Metern bis ca. 2 km erzielen, wurden ab 2003 entwickelt. Sie werden vor allem im Bereich der Windenergie eingesetzt, da die heutigen Nabenhöhen großer Windturbinen von über hundert Metern durch mit In-situ-Windmessgeräten bestückten Messmasten mit vertretbarem Aufwand kaum noch zu erreichen sind. 2006 kam zunächst das um eine Richtung (in der Regel die Vertikale) konisch herum scannende ZephIR-Wind-Lidar der englischen Firma QinetiQ auf den Markt [12 bis 14], bei dem die Entfernungszuordnung des rückgestreuten Signals nicht über die Laufzeit, sondern über eine Fokussierung des ausgesandten Strahls erfolgt. Ende 2006 folgte das „Windcube“ genannte, ebenfalls um eine Richtung herum konisch scannierende Wind-Lidar der französischen Firma Leosphere, bei dem die Entfernungszuordnung wieder auf der Laufzeitbestimmung des Signals basiert [13; 14]. Seit einigen Jahren ist auch das in beliebige Richtungen scannierende Streamline-Wind-Lidar (bei einem Anbieter auch als Galion-Wind-Lidar bezeichnet) der englischen Firma Halo Photonics auf dem Markt. Mittlerweile bietet auch Leosphere eine beliebig scannende Version seines Wind-Lidars an.
Aufgrund dieser rasanten Entwicklung der Messtechnik und des entstandenen kommerziellen internationalen Marktes für diese Geräte wurde das Thema Wind-Lidar in der Norm ISO 28902-2 [15] auch international standardisiert. Diese steht seit Januar 2015 als Entwurf zur Abstimmung und soll 2016 endgültig erscheinen. Sie wurde durch das Technische Komitee (ISO/TC) 146 „Luftbeschaffenheit“, Unterkommittee (SC) 5 „Meteorologie“ in Kooperation mit der Weltorganisation für Meteorologie (WMO) als gemeinsame ISO/WMO-Norm erstellt. Die Erstellung geht auf ein Abkommen zwischen WMO und ISO aus dem Jahre 2008 zurück. Die ISO 28902-2 wird in das deutsche Regelwerk als DIN ISO 28902-2 übernommen. Nach dem Erscheinen dieser Norm im Jahr 2016 wird die Richtlinie VDI 3786 Blatt 14 zurückgezogen.
3.3 Sichtweiten-Lidar (VDI 3786 Blatt 15 und DIN ISO 28902-1)
Auf die Erarbeitung der Richtlinie VDI 3786 Blatt 14 folgte das Projekt, das ein Lidar-Verfahren zur bodengebundenen Fernmessung der Sichtweite behandelt. Diese Richtlinie VDI 3786 Blatt 15 erschien im August 2004 und war die Grundlage für die im Juni 2012 herausgegebene Norm ISO 28902-1 [16]. Diese Norm ist als DIN ISO 28902-1 ins deutsche Regelwerk übernommen worden und hat die Richtlinie VDI 3786 Blatt 15 ersetzt.
Beschränkt man, wie in DIN ISO 28902-1 ausgeführt, die quantitative Bestimmung der richtungsabhängigen meteorologischen Sichtweite (MOR) auf Werte zwischen 30 und 2 000 m, so ist dies auch mit einfachen augensicheren Lidar-Systemen möglich, die im nahen Infrarotbereich arbeiten. Die Hauptaufgabe solcher für wartungsfreien Dauereinsatz ausgelegten Geräte ist in der Regel die Bestimmung der Höhe von Wolkenuntergrenzen. Sie werden deshalb als Ceilometer bezeichnet und sind seit den 1980er-Jahren vor allem im Bereich der Flugmeteorologie im Einsatz. Moderne Vertreter dieser Lidar-Klasse sind die Systeme CL51 der Fa. Vaisala, CHM 15k der Fa. Lufft und CS135 der Fa. Campbell Scientific. Mögliche Einsatzgebiete für Sichtweitenlidare sind neben der Flugmeteorologie Wetterstationen, Häfen, Wasserstraßen, Straßen, Bohrinseln und Kraftfahrzeuge. Für Letztere sind wesentlich kleinere Systeme als Ceilometer denkbar, die zur Warnung vor starkem Nebel und zur Erkennung von Hindernissen nur den Bereich niedriger Sichtweiten abdecken.
Die Norm DIN ISO 28902-1 beschreibt die sich aus der Einschränkung des betrachteten MOR-Bereichs ergebende zulässige Vereinfachung der Lidargleichung und die Bestimmung des entfernungsaufgelösten Profils des Extinktionskoeffizienten, aus dem die MOR berechnet werden kann.
Wegen der weiten Verbreitung von Ceilometern und ihres vielfältigen Einsatzes im wissenschaftlichen Bereich, auch in geografischen Regionen mit einer geringen Dichte von hochwertigen Forschungs-Lidaren, besteht zunehmender Beratungsbedarf, der in der Regel von Herstellern und „etablierten“ Lidar-Wissenschaftlern geleistet wird. Dabei hat sich DIN ISO 28902-1 als wertvolles Werkzeug erwiesen. Auch dies war eine wichtige Motivation für die Autoren der sich mit dem Thema Lidar befassenden VDI-Richtlinien, sich der Rückstreulidar-Richtlinie zuzuwenden, die weit anspruchsvollere Anwendungen von Lidaren beschreibt.
4 In Arbeit befindliche VDI-Richtlinie: Rückstreu-Lidar
Derzeit wird in Deutschland die VDI-Richtlinie Rückstreu-Lidar zusammengestellt. Der erste Entwurf soll 2016 als VDI 3789 Blatt 19 veröffentlicht werden. Deshalb sind alle Informationen über diesen Standard noch vorläufig. Die Richtlinie besteht aus elf Kapiteln und einem Anhang. Sie umfasst unter anderem den Anwendungsbereich, Grundlagen des Rückstreu-Lidars, Zielgrößen und Verfahrensmerkmale, eine Beschreibung der Systemkomponenten, Hinweise zur Messplanung sowie Unsicherheitsbetrachtungen, Qualitätssicherung und Messbeispiele. Der Anhang fasst Forderungen zusammen, die die Hersteller für die Datenauswerte-Algorithmen an die Datennutzer bereitzustellen haben. An dieser Stelle sollen einige Bemerkungen zu drei ausgewählten Kapiteln präsentiert werden.
In Kapitel 1 werden mögliche Einsatzgebiete eines Rückstreu-Lidars beschrieben, was auch gleich die möglichen Kunden des Standards zeigt. Mögliche Anwendungen eines Rückstreu-Lidars sind die Bereiche
- Nachweis von atmosphärischen Partikelschichten bzw. Wolkengrenzen,
- Ableitung von Profilen des Partikelrückstreukoeffizienten, der Größe und Form der Partikel,
- Überwachung der Luftqualität,
- Beiträge zur Sicherheit des Flugverkehrs,
- Wettervorhersage und
- Satelliten-Fernerkundung.
Die theoretischen Grundlagen für ein elastisches Rückstreu-Lidar werden in Kapitel 5 beschrieben. Erläutert werden Rahmenbedingungen für die Richtlinie, wichtige Systemteile eines Rückstreu-Lidars und die Lidargleichung. Danach folgen Überlegungen zur Wahl der Wellenlänge, Definitionen der wichtigsten Größen, die für eine Beschreibung der Aerosolverteilung herangezogen werden können, wie z. B. die des gedämpften Rückstreukoeffizienten, und die Zusammenstellung der gebräuchlichsten Verfahren zur Bestimmung der Zielgrößen, wie z. B. die Verfahren nach Klett und Fernald [17 bis 19] für den Rückstreukoeffizienten der Partikel. Ferner wird die Bestimmung abgeleiteter Größen wie des Depolarisaionsverhältnisses, des Ångström-Exponenten und des Farbverhältnisses beschrieben und ihr Nutzen für die Aerosolcharakterisierung diskutiert.
In Kapitel 6 wird ein Überblick über die primären und die abgeleiteten Zielgrößen gegeben. Als primäre Zielgrößen werden das entfernungskorrigierte Rückstreusignal, der gedämpfte Rückstreukoeffizient und der Partikelrückstreukoeffizient eingeführt. Abgeleitete Zielgrößen sind Grenzen der atmosphärischen Partikelschichten, Wolkenhöhen, die vertikale Ausdehnung von Wolken und Aerosolschichten und die Form-Klassifizierung der Partikel (lineares Depolarisationverhältnis). Anschließend werden erforderliche Hilfsgrößen (wie beispielsweise das Vertikalprofil der Luftdichte) genannt, die für die Anwendung des Klett-Fernald-Formalismus erforderlich sind. Die Verfahrenskenngrößen wie das Signal-zu-Rausch-Verhältnis, die zeitliche und vertikale Mittelung der Messsignale und die Überlappfunktion bestimmen, inwieweit aus den Messungen die Zielgrößen ermittelt werden können. Die Definition der Verfahrenskenngrößen Einsatzpunkt, Reichweite, Verfügbarkeit, Konventionsreichweite und Datenverfügbarkeit machen einen Vergleich verschiedener Systeme möglich.
5 Kooperation von Entwicklern, Konstrukteuren und Nutzern im Rahmen der Richtlinienarbeit
Bild 2 zeigt eine schematische Skizze der Zusammenarbeit zur Ausarbeitung von Richtlinien von Lidar-Wissenschaftlern, -Technikern und -Nutzern.
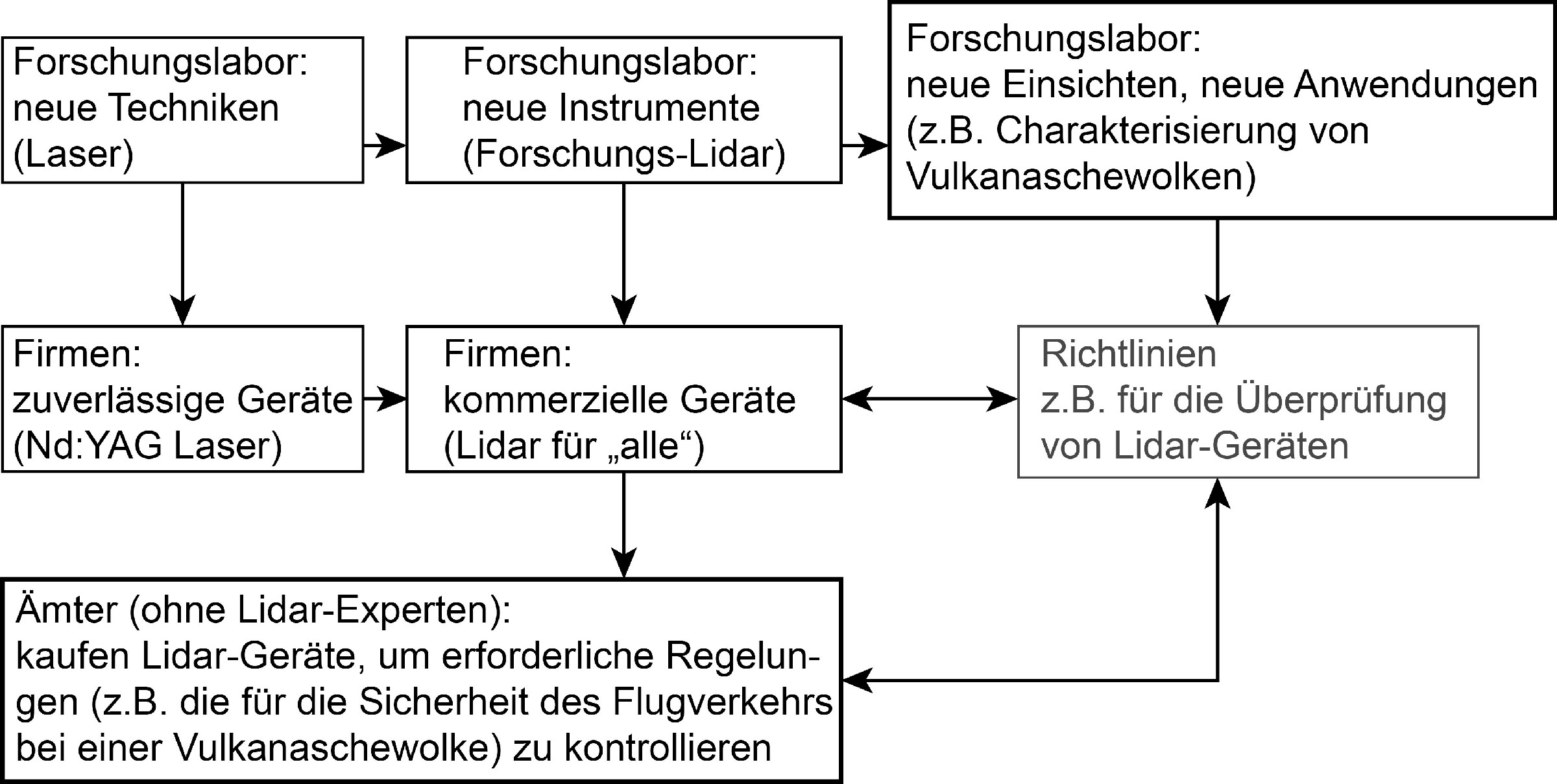
Bild 2. Schematische Darstellung zur Kooperation von Lidar-Wissenschaftlern, -Technikern und -Nutzern, die zur Ausarbeitung von Richtlinien führt. Der Vulkanaschefall ist hier als ein Beispiel gewählt, das die Arbeit an Lidar-Richtlinien verstärkt hat.
Foto: Autoren
Rückblickend betrachtet wurden die ersten Lidar-Systeme vor und unabhängig von der Erfindung der Laser betrieben. Dennoch war die Anwendung von Lasern in Lidar-Geräten ein großer Schritt vorwärts und sie war unabdingbar für die Entwicklung und Verbesserung der verschiedenen heute verfügbaren Lidar-Typen und deren Anwendungen für die Atmosphärenforschung durch Forschungsinstitute. Ein aktuelles Beispiel dieser neuen atmosphärischen Einblicke ist die Bestimmung der Massenkonzentrationen in den Aschewolken, aus dem isländischen Vulkan Eyjafjallajökull (vgl. z. B. [20]).
Parallel zu diesen Aktivitäten wurden Unternehmen für die Herstellung von Lidar-Systemen gegründet. Anfangs dienten die Produkte nur Forschungsinstituten mit Lidar-Experten, die ein tiefes Verständnis der zugrunde liegenden Konzepte aufwiesen und eigenständig Anwendungen entwickeln und optimieren konnten. Mit der Zeit wurden kleinere und „plug-and-play“-Lidar-Systeme von den Unternehmen angeboten, was u. a. durch die Entwicklung von kleineren und billigeren Lasern möglich war.
Die Forschungsinstitute wiesen nach, dass Lidar-Systeme sehr erfolgreich zur Überwachung bestimmter atmosphärischer Ereignisse (z. B. Aschewolken nach Vulkanausbrüchen, Unterscheidung natürlicher und anthropogener Partikel) eingesetzt werden konnten. Damit erkannten auch Behörden einen Nutzen für eigene Aufgaben der Überwachung der Luftqualität und von Flugsicherheitsverordnungen (z. B. Bestimmung der Aschepartikelmassenkonzentration in bestimmten Flugniveaus). Infolgedessen begannen nationale Wetterdienste, kleinere Lidars zu erwerben und in Form von Messnetzen einzusetzen.
Diese Entwicklung führte direkt zur Notwendigkeit von Richtlinien über Lidar-Systeme und deren Produkte für den öffentlichen Gebrauch.
Das Interesse der Forscher bei der Entwicklung dieser Richtlinien ist, dass sie häufig in staatlichen geförderten Instituten arbeiten und ihre Ergebnisse durch ihre Mitarbeit bei der Richtlinienerstellung angewendet werden. Das Interesse der Behörden an solchen Richtlinien liegt darin, dass sie die Lidar-Systeme für ihre Zwecke nutzen können. Mit dem Wissen können sie Risiken und gefährliche Situationen reduzieren oder teils sogar vermeiden. Das Interesse der Unternehmen zur Mitarbeit an diesen Richtlinien ist, dass sie damit Dokumente erhalten, auf die verwiesen werden kann, wenn sie ihre Produkte anbieten. Diese Richtlinien helfen den Lidar-Herstellern, ihre Systeme Behörden anzubieten. Die Richtlinien helfen anderseits auch den Behörden, solche Systeme zu kaufen, da die Richtlinien beispielsweise zu vergleichenden Systembeurteilungen eingesetzt werden können. Die Richtlinien definieren eine bestimmte Qualität und helfen bei der Qualitätskontrolle, sie machen Systeme vergleichbar und zeigen auf, was die Systeme mindestens gewährleisten müssen.
6 Nationale und internationale Gremien zur Erarbeitung technischer Regeln
In Deutschland sind zwei Regelsetzer für die Standardisierung der Themenfelder in der Meteorologie verantwortlich: das Deutsche Institut für Normung e. V. (DIN) und der Verein Deutscher Ingenieure e. V. (VDI). Sie arbeiten in der Kommission Reinhaltung der Luft (KRdL) im VDI und DIN zusammen. Ein Fachbereich der KRdL ist für die Ausarbeitung von technischen Regeln zu umweltmeteorologischen Fragestellungen inklusive meteorologischer Messungen verantwortlich.
Das DIN repräsentiert Deutschland in der Internationalen Organisation für Normung (ISO). ISO ist eine unabhängige nicht staatliche Organisation. Ihre Mitglieder sind die Normungsinstitute aus 163 Ländern. Die Arbeitsgruppen bestehen aus Fachleuten der am Thema interessierten Staaten, die vom jeweiligen Normungsinstitut als nationale Experten in die ISO-Arbeitsgruppen entsandt werden.
Jedes technische Komitee (ISO/TC) und jede ISO-Arbeitsgruppe hat ein dazugehöriges Spiegelgremium im DIN. Der Unterausschuss (SC) 5 des TC 146 beschäftigt sich mit Meteorologie. Derzeit gibt es im ISO/TC146/SC5 17 teilnehmende Staaten und zehn mit Beobachterstatus.
Alle Normungsvorhaben des ISO/TC146/SC5 „Meteorologie“ werden in Zusammenarbeit mit der Weltorganisation für Meteorologie (WMO) durch deren Komitee für Instrumente und Methoden der Beobachtung (CIMO) erarbeitet.
Literatur
[1] Synge, E. H.: A method of investigating the higher atmosphere. Phil. Mag. 9 (1930), S. 1014-1020.
[2] Fiocco, G.; Smullin, L. D.: Detection of scattering layers in the upper atmosphere (60-140 km) by optical radar. Lett. Nature. 1999 (1963), S. 1275-1276. doi.org/10.1038/1991275a0
[3] Weitkamp, C. (Hrsg.): Lidar. Range-resolved optical remote sensing of the atmosphere. New York: Springer Science + Business Media 2005.
[4] Measures, R. M.: Laser remote sensing: Fundamentals and applications. Malabar: Krieger Publishing 1991.
[5] Plan for the implementation of the GAW Aerosol Lidar Observation Network GALION. GAW Report No. 178. Hrsg.: World Meteorological Organization. Hamburg 2007. ftp://ftp.wmo. int/Documents/PublicWeb/arep/gaw/gaw178-galion-27- Oct.pdf
[6] VDI 4210 Blatt 1: Fernmeßverfahren, Messungen in der Atmosphäre nache dem LIDAR-Prinzip, Messen gasförmiger Luftverunreinigungen mit dem DAS-LIDAR. Berlin: Beuth 1999.
[7] Behrendt, A. et al.: Intercomparison of water vapor data measured with lidar during IHOP_2002, Part 1: Airborne to ground-based lidar systems and comparisons with chilled- mirror hygrometer radiosondes. J. Atmosph. Oceanic Technol. 24 (2007) Nr. 1, S. 3-21.
[8] Behrendt, A. et al.: Intercomparison of water vapor data measured with lidar during IHOP_2002, Part 2: Airborne to airborne systems. J. Atmosph. Oceanic Technol. 24 (2007) Nr. 1, S. 22-39.
[9] VDI 3786 Blatt 14: Umweltmeteorologie – Bodengebundene Fernmessung des Windvektors – Doppler-Wind-LIDAR. Berlin: Beuth 2001.
[10] Emeis, S.: Measurement methods in atmospheric sciences. In situ and remote. Series: Quantifying the Environment Vol. 1. Stuttgart: Borntraeger 2010.
[11] Roths, J.; Klein, V.; Hilber, B.; Heilmann, R.: Spatial monitoring of atmospheric boundary layer winds by Doppler Lidar. In: Ansmann, A. et al. (Hrsg.): Advances in atmospheric remote sensing with Lidar, S. 239-242. Berlin: Springer 1997.
[12] Smith, D.; Harris, M.; Coffey, A.; Mikkelsen, T.; Jørgensen, H.; Mann, J.; Danielian, R.: Wind Lidar evaluation at the Danish wind test site in Høvsøre. Wind Energy 9 ( 2006), S. 87-93.
[13] Emeis, S.; Harris, M.; Banta, R. M.: Boundary-layer anemometry by optical remote sensing for wind energy applications. Meteorol. Z. 16 (2007), S. 337-347.
[14] Mikkelsen, T.; Mann, J.; Courtney, M.: Wind scanner: A full-scale laser facility for wind and turbulence measurements around large wind turbines. Europ. Wind Energy Conf. EWEC. Brüssel 2008.
[15] ISO/DIS 28902-2: Air quality. Environmental meteorology. Part 2: Ground-based remote sensing of wind by heterodyne pulsed Doppler Lidar. Genf: International Organization for Standardization 2015.
[16] ISO 28902-1: Air quality. Environmental meteorology. Part 1: Ground-based remote sensing of visual range by Lidar. Genf: International Organization for Standardization 2012.
[17] Klett, J. D.: Stable analytical inversion solution for processing lidar returns. Appl. Opt. 20 (1981), S. 211-220.
[18] Klett, J. D.: Lidar inversion with variable backscatter/extinction ratios. Appl. Opt. 24 (1985), S. 1638-1643.
[19] Fernald, F. G.: Analysis of atmospheric lidar observations: some comments. Appl. Opt. 23 (1984), S. 652-653.
[20] Wiegner, M.; Gasteiger, J.; Groß, S.; Schnell, F.; Freudenthaler, V.; Forkel, R.: Characterization of the Eyjafjallajökull ash- plume, 2012: Potential of lidar remote sensing. J. Phys. Chem. Earth 45/46 (2012), S. 79-86.
Dr. Dietrich Althausen, Leibniz Institute for Tropospheric Research (TROPOS), Leipzig.Prof. Dr. Stefan Emeis, Karlsruher Institut für Technologie (KIT), Institut für Meteorologie und Klimaforschung (IMK – IFU), Garmisch-Partenkirchen.Dr. Andreas Behrendt, Universität Hohenheim, Institut für Physik und Meteorologie, Stuttgart.Simon Jäckel, Verein Deutscher Ingenieure e. V., Kommission Reinhaltung der Luft (KRdL) im VDI und DIN, Düsseldorf.Christoph Münkel, Vaisala GmbH, Hamburg.Dr. Matthias Wiegner, Ludwig-Maximilians-Universität, Meteorologisches Institut, München.








