Die Mathematik will Robotern das Laufen beibringen
Sie sollen nicht nur aussehen wie Menschen, sondern auch so gehen. Die Mathematik soll Robotern jetzt menschliche Fortbewegung beibringen – mit all ihren Möglichkeiten. Das Forschungsprojekt „KoroiBot“ will menschliche Bewegungsabläufe in Algorithmen erfassen und auf die Steuerung von Robotern übertragen.
Zweibeinigen Robotern ein stabiles und robustes „menschliches“ Gehen beizubringen - dieses Ziel verfolgt das internationale Forschungsprojekt „KoroiBot“ mit Wissenschaftlern von sieben Institutionen aus Deutschland, Frankreich, Israel, Italien und den Niederlanden.
Foto: Uni Heidelberg
Retter in Katastrohengebieten, Helfer im Haushalt, Kollegen bei der Arbeit oder Spielgefährten: Die Einsatzgebiete für humanoide Roboter sind vielfältig. Dass die Roboter stabil und robust gehen können, ist eine Voraussetzung in vielen Einsatzgebieten. „Eine der großen Herausforderungen auf dem Weg dorthin ist es, Roboter in die Lage zu versetzen, sich in verschiedenen Situationen unfallfrei auf zwei Beinen fortzubewegen – trotz unbekannter Untergründe und auch bei eventuellen Störungen“, sagt Katja Mombaur, wissenschaftliche Leiterin des Projekts KoroiBot.
Die Motorik des Menschen ist Vorbild
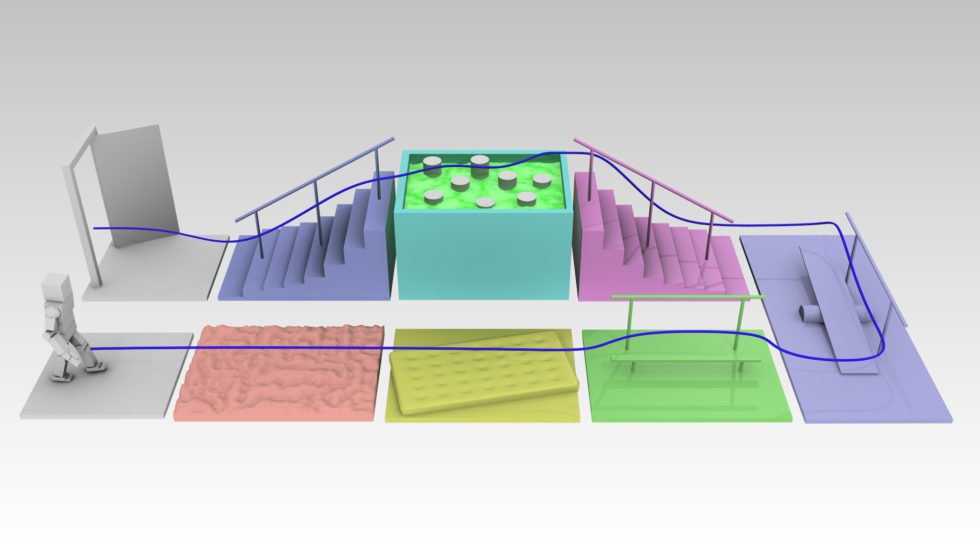
Am Anfang der Forschung steht die Beobachtung des Menschen. Was passiert, wenn er eine Treppe hochsteigt? Mit welchen Bewegungen gleicht er rutschige oder schiefe Untergründe aus? Wie hält er die Balance auf Balken und Wippen? All das untersuchen die Wissenschaftler im Experiment und gießen die Ergebnisse in mathematische Formeln. Die Algorithmen, in denen die Bewegungsabläufe erfasst sind, sollen anschließend auf technische Apparaturen übertragen werden.
Ganz praktisch könnte das bedeuten: Sie fließen in die Steuerung bereits vorhandener Roboter ein. Die Forscher planen aber mehr: Sie wollen auch neue Optimierungs- und Lernverfahren für zweibeiniges Gehen entwickeln. Darüber hinaus sollen sich die Forschungsergebnisse Planung künftiger Roboter wiederfinden: Sie sollen in die Designprinzipien der nächsten Robotergeneration einfließen.
Praktischer Einsatz in der Medizin und beim Spiel möglich
Die praktische Anwendung geht über die Robotik hinaus. Eine Möglichkeit ist der Einsatz in der Medizin, bei der Steuerung intelligenter Prothesen beispielsweise. Oder in Design und Regelung sogenannter Exoskelette: Das sind Hüllen, die die Bewegungen des Menschen unterstützen. Weitere Einsatzbereiche könnten Computeranimation und Videospieldesign werden.
Im Forschungsprojekt KoroiBot arbeiten Experten aus den Bereichen Robotik, Mathematik und Kognitionswissenschaften aus Deutschland, Frankreich, Israel, Italien und den Niederlanden zusammen. Die Europäische Union finanziert die dreijährigen Forschungsarbeiten, die im Oktober 2013 begonnen haben, mit rund 4,16 Millionen Euro. Knapp 900 000 Euro davon fließen nach Heidelberg.
Ein Beitrag von:












