Vorbild Oktopus: Das können weiche Roboter besser
Soft Robotics sind auf dem Vormarsch. Aber ihre Entwicklung ein hartes Unterfangen. So wie der achtarmige Oktopus, den sich ein italienisches Team vor neun Jahren vorgenommen hat. Inzwischen kann der künstliche Tintenfisch seine Arme dehnen und strecken, nach Dingen greifen und sich am Meeresboden bewegen.

Der künstliche Oktopusarm kann sich biegen, strecken, zusammenziehen oder versteifen.
Foto: octopusproject.eu
Soft Robotics heißt seit einigen Jahren ein Zauberwort in der wissenschaftlichen Robotik. Statt einer Maschine aus Metall, die etwas ungelenk immer dieselben Bewegungen ausführt, sind die „weichen“ Roboter der Zukunft biegsam und dehnbar, passen sich ihrer Umgebung an und können sich erstaunlich komplex darin bewegen. Ein Robotiker-Team aus Pisa widmet sich seit 2009 einem Oktopus-Roboter und versucht, die geschmeidigen Bewegungen der Arme seines biologischen Vorbilds zu imitieren.
Roboter-Experten arbeiteten mit Meeresbiologen zusammen
Cecilia Laschi vom BioRobotics Institute der Scuola Superiore Sant’Anna in Pisa, Italien, leitet das dortige Forschungsteam Soft Robotics. Sie habe sich aus zwei Gründen dazu entschlossen, den Oktopus für den Bau eines Roboters als Vorbild zu nehmen, sagt die Professorin. „Eine Maschine, die sich ausdehnen und zusammenziehen kann, hat viele Vorteile. Außerdem reizt mich die ingenieur-technische Herausforderung. Einen Oktopus zu entwickeln und zu kontrollieren, dessen acht bewegliche Arme im Wasser zusammenarbeiten, ist sehr schwierig.“ Seit sieben Jahren arbeitet das Team in Pisa, gemeinsam mit anderen europäischen und israelischen Laboren am „Octpus Integrating Project“.
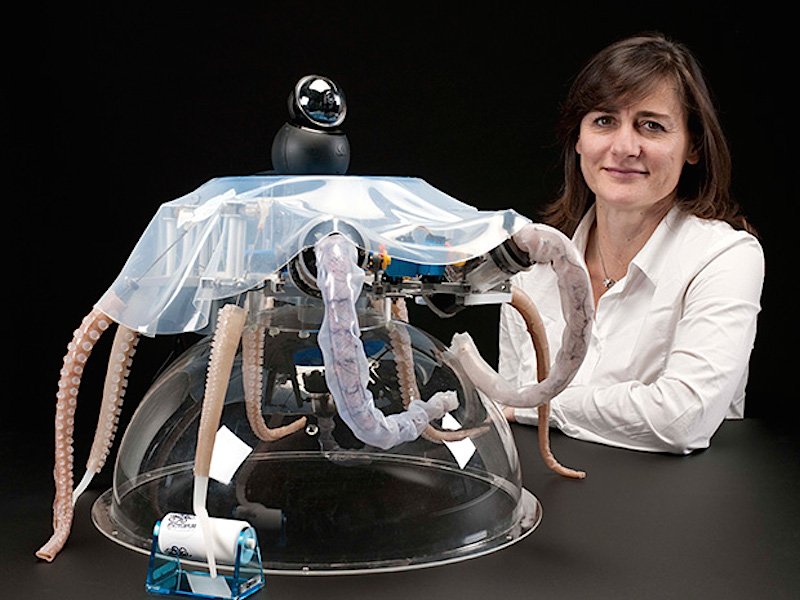
Cecilia Laschi und einer ihrer Oktopus-Roboter.
Quelle: Jennie Hills/London Science Museum
Das tierische Vorbild, der Oktopus, hat weder ein inneres noch ein äußeres Skelett. Er kann seine acht Arme an jeder Stelle biegen, strecken, zusammenziehen oder versteifen und mit erstaunlicher Geschicklichkeit mit ihnen hantieren – zum Beispiel, um sich aus einer zugeschraubten Dose befreien. Um die Biologie in Ingenieurskunst zu übertragen, arbeiteten die Robotiker mit Meeresbiologen zusammen. Zunächst ging es darum, die Muskeln zu simulieren.
Wie imitiert man Muskeln?
Als eine Option testeten die Wissenschaftler sogenannte elektro-aktive Polymere (EAPs). Dabei wird eine Lage weiches Material zwischen zwei Elektroden gelegt, die sich unter Spannung zusammenziehen und das weiche Material zusammendrücken. Als weitere Möglichkeit entwickelte das Team Roboterarme, in denen Gase oder Flüssigkeiten durch Kammern strömen und dadurch gezielte Verformungen erwirken können.
Statt die Kammern mit Flüssigkeit zu füllen, kamen als interessante Alternative auch andere Materialien wie Sand oder sogar gemahlener Kaffee infrage. Der Arm bliebe dadurch geschmeidig, so Professorin Laschi, könne sich aber schlagartig versteifen, wenn ein Vakuum angelegt würde – genauso wie die vakuumierte Kaffeepackung funktioniert. Lege man dieses Vakuum in einzelnen Bereichen und programmierten Sequenzen an, könnte sich der Arm in spezifischer Weise bewegen.
Form verändern und in Erinnerung behalten
Am vielversprechendsten sei für das Team die Imitation eines künstlichen Muskels mit Hilfe von sogenannten „shape-memory alloys (SMAs) gewesen. Diese können sich unter Hitzeeinwirkung in einer vorgegebenen Form verändern und diese Form in Erinnerung behalten. „Wir haben daraus Federn hergestellt und eine elektrische Spannung angelegt, um sie aufzuheizen.

Vorbild Natur: Ein Robotiker-Team aus Pisa widmet sich seit 2009 einem Oktopus-Roboter und versucht, die geschmeidigen Bewegungen der Arme seines biologischen Vorbilds zu imitieren.
Quelle: octopusproject.eu
Die Kontraktionen waren muskulären Kontraktionen sehr ähnlich“, sagt Laschi. Nun konstruierte das Team einen Oktopus-Arm mit „Muskelfasern“ in Quer- und Längsrichtung, wie bei einem echten Oktopus. Der so entstandene künstliche Arm konnte sich tatsächlich unter Wasser biegen, ausdehnen, zusammenziehen und sogar nach Dingen greifen.

Der künstliche Oktopus bewegt sich am Meeresboden
Der Nachbau eines Armes reicht natürlich noch nicht für eine möglichst naturgetreue Oktopus-Imitation. Das Wissenschaftler-Team begann damit, das Zusammenspiel der acht unabhängigen Arme zu erkunden. Biologen gehen davon aus, dass das Gehirn eines Oktopus nicht jede der Armbewegungen aktiv und einzeln steuert. Dafür sind vielmehr mehrere motorische Zentren in der Peripherie verantwortlich.
Nur wenig Rechenleistung nötig
Überdies hat die Evolution dazu geführt, dass der Körper auf seine Umgebung in automatisierter Weise reagiert, mit einer Art den Gliedmaßen innewohnenden Intelligenz. Für die Imitation in der Robotik würde das bedeuten, dass automatisierte Eigenschaften mit wenig Rechenleistung erreicht werden können.
Inzwischen haben die Wissenschaftler einen Oktopus konstruiert, der sich wie sein lebendes Vorbild am Meeresboden fortbewegen kann und dabei einen vierstufigen Bewegungsprozess imitiert. Dessen Hirn sei „erstaunlich dumm“, denn die Arme waren vorher so programmiert worden, dass sie sich in korrekter Sequenz bewegten und wenig Rechenleistung benötigten.
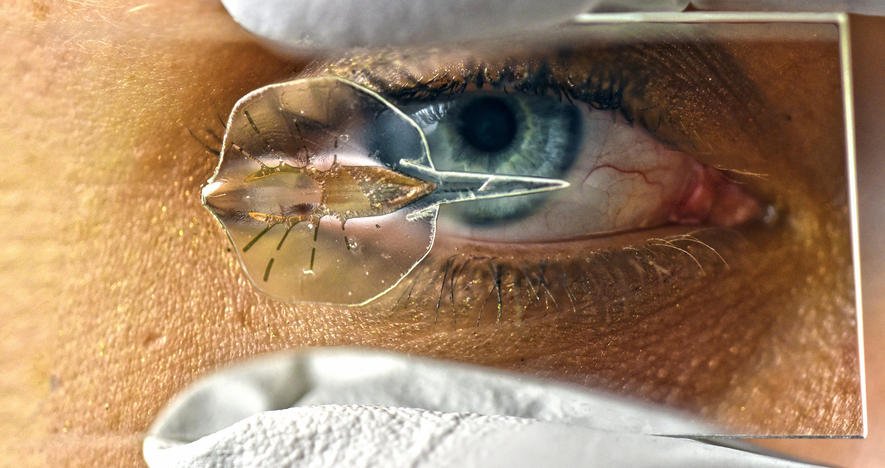
Blick auf den künstlichen Rochen: Auf seiner Oberfläche sitzen Herzmuskelzellen von Ratten, die sich auf Lichtsignale hin zusammenziehen. Dadurch kann der Roboter in einer Nährstofflösung schwimmen.
Quelle: Karaghen Hudson/dpa
Ein Skelett aus Gold, eine Kunststoffhülle und 200.000 Herzmuskelzellen von Ratten. Mit diesen Komponenten schwimmt ein künstlicher Rochen aus den USA. Forscher steuern das Mischwesen mit Lichtsignalen.
Ein Beitrag von:













